ウェビナーで、先の読めない時代に必要な柔軟性をアピール/ユニバーサルロボット
接触したら次の動作へ
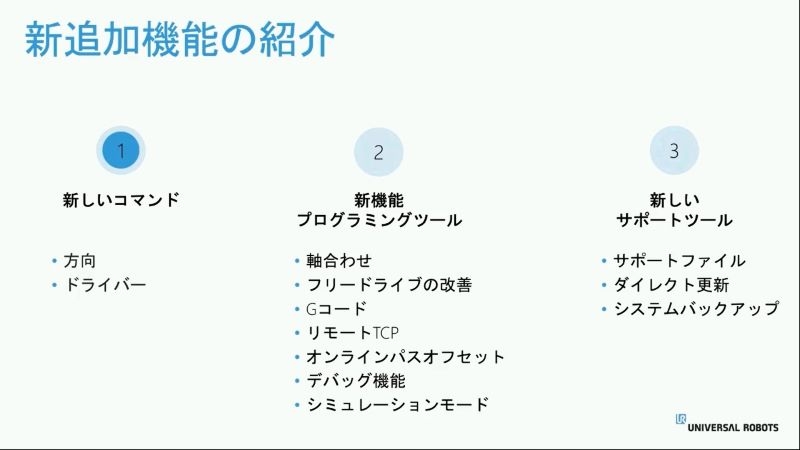
5月27日のウェビナー「URロボット、ソフトウェア新機能の紹介」では、ポリスコープの最新版であるバージョン5.8を解説した。
主に12の機能を追加。例えばロボットが接触を検知して次の動作に移るコマンドを搭載した。従来も接触を検知すると動作を止める機能はあったが、それを強化した。

この新機能により、持ち上げ作業時の教示の手間を減らせる。積み重なった対象物を1つだけ持ち上げる際には、対象物の真上からロボットアームを下ろし、対象物に接触させる。接触を検知したらハンドで対象物をつかむ。このようにすれば、対象物の積み重なった個数が変わり高さが変わっても、一度の教示で対応できる。
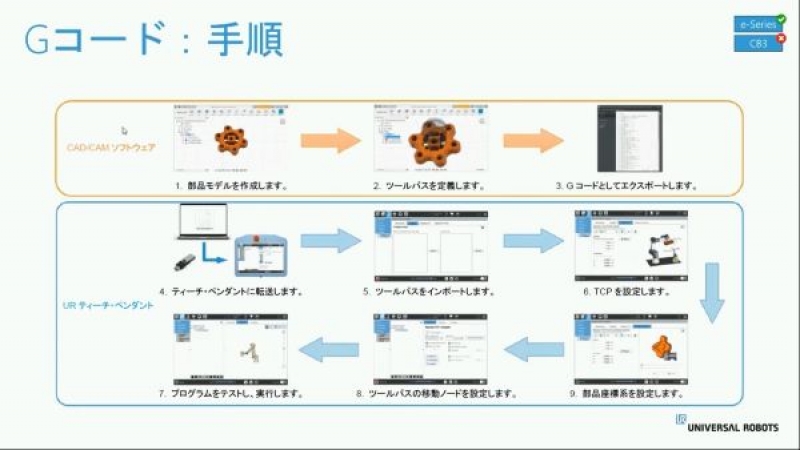
Gコード対応により、金属加工現場で使いやすく
また、工作機械の制御に使うプログラミング言語のGコードを読み込めるようになった。ソフト上で加工対象物の外形を認識でき、外形に沿った動作の教示を簡単にできる。
工作機械での加工時にできた不必要な突起を除去する「バリ取り」作業時には、ロボットに回転工具を取り付け、それを当てながら対象物の縁に沿って動かす。あらかじめ外形が分かれば、それに沿ってロボットアームを動かすように教示するだけで済む。
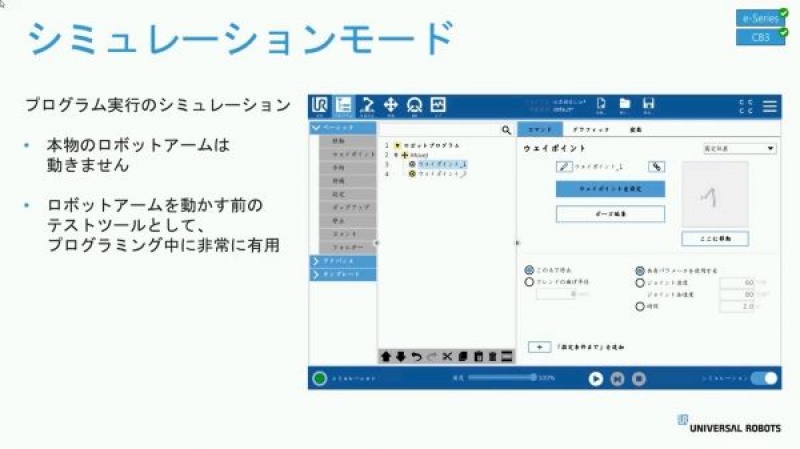
さらに、ソフト上でロボット動作のシミュレーションをできるようにした。これまでは、ロボット本体を実際に動かして動作確認をしていたが、この機能の搭載によりソフト上で簡単に確認できる。
その他にも、ねじ締め動作をテンプレートとして用意するなど、多くの機能を強化した。
このウェビナーを受講して、URロボットの使いやすさをよく理解できた。また実例に触れることで、その裏にある開発思想を感じた。
送信側のURと受信側の記者のどちらの通信環境に問題があったかは不明だが、途中で解説に使った動画が途切れる場面も。ただ、途切れた動画を後日、受講者に再配信するなどサポートにも気を配っているようだ。この辺りは手探りながら、今後は改善されるだろう。
採用業種が増えても、やるべきことは変わらない

セミナーを担当した西部マネジャーに後日取材し、手応えを聞いた。
西部マネジャーは、これまでのウェビナー開催で思わぬ効果があったという。「受講者を分析すると、遠方の方も受講している。また、パソコンの前で気軽に見られるのが好評で、対面式のセミナーよりも質問を多く受ける」。テーマにもよるが、現在では1回あたり数百人が受講する。
オンデマンド版として、ウェビナーの様子を録画した動画も公開する。何度も繰り返し見られるため、高度な技術解説を含むテーマの時は特に好評で、各自のペースで振り返りながら学習できる。
技術系のウェビナーが好評だったため、ウェビナーとは別に、技術解説の動画をそろえた特設ページも開設した。プログラマブル・ロジック・コントローラー(PLC)への接続方法やロボットの遠隔操作などの解説動画を掲載する。今後もコンテンツを追加する予定だ。
西部マネジャーは今だからこその、URロボットの優位性をアピールする。「コロナ後の世界は先が読めない。フレキシブルに運用でき、生産現場の柔軟性を高める設備としてURロボットは最適。使われる業種が広がり新たな用途が生じたら、これまで同様にソフトによる機能向上を軸に、使いやすさを高めていく」と意気込む。
(ロボットダイジェスト編集部 西塚将喜)
同じ企業の記事
>>高専・職業訓練施設がURの協働ロボットを導入/ユニバーサルロボット
>>8kg可搬のロングリーチ仕様を発売/ユニバーサルロボット
>>協働ロボのフェア開催、自動化の次の一手を提案/ユニバーサルロボット
>>協働ロボットでも速い! 新製品や新ソフトを国内初披露/ユニバーサルロボット
>>UR史上最速の新型協働ロボットを発売/ユニバーサルロボット
>>国内のサービス体制を強化、サービスハブや部品倉庫を開設/ユニバーサルロボット
>>3社をシステムインテグレーターとして認定/ユニバーサルロボット
>>協働ロボットフェアで周辺機器やソリューションが一堂に/ユニバーサルロボット
>>エアグリッパーとTIG溶接パッケージをUR+に認証/ユニバーサルロボット
>>ユーザーのロボット活用を支援するプログラムを開始/ユニバーサルロボット
>>[2023国際ロボット展リポートvol.13]協働ロボットの普及はまだまだ“初期段階”/ユニバーサルロボット ステイシー・モーザーCCO
>>30kg可搬の協働ロボット発売! 高可搬だがコンパクトで軽量/ユニバーサルロボット
>>「URアカデミー」の受講者数が全世界で20万人突破/ユニバーサルロボット
>>日本初のフェア開催、協働ロボの市場広げる手助けに/ユニバーサルロボット
>>ハイオスの電動ドライバーがUR+認証取得/ユニバーサルロボット
>>三菱電機と共に協働ロボットの稼働監視ウェビナーを開催/ユニバーサルロボット
>>パートナー企業35社とオンライン展、9月12日から/ユニバーサルロボット
>>四国、中部のSIerがURの認定取得/ユニバーサルロボット
>>稼働モニタリングなどユーザー向け新サービスを開始/ユニバーサルロボット
>>パートナー27社とオンライン展開催/ユニバーサルロボット
>>認定トレーニングセンターを拡充/ユニバーサルロボット
>>ナベルHDのロボットカバーをUR+製品として認証/ユニバーサルロボット
>>日東工器の電動ドライバーをUR+製品として認証/ユニバーサルロボット
>>過去最高の売上高を達成/ユニバーサルロボット
>>愛同工業の自動車部品工場に協働ロボ導入/ユニバーサルロボット
>>板金工場の溶接工程に協働ロボットが採用/ユニバーサルロボット
>>UR10eの可搬質量を25%向上/ユニバーサルロボット
>>協働ロボットのオンライン展を開催/ユニバーサルロボット
>>新社長にキム・ポヴルセン氏/ユニバーサルロボット
>>協働ロボットのバーチャル展開催、2月19日まで/ユニバーサルロボット
>>世界で累計販売台数5万台を達成/ユニバーサルロボット
>>全国5都市に認定トレーニングセンター開設/ユニバーサルロボット
>>[人事]新社長にテラダインのグレゴリー・スミス氏/ユニバーサルロボット
>>9日からウェブ展開催、パートナー企業22社も出展/ユニバーサルロボット
>>林業の苗木生産に協働ロボが採用/ユニバーサルロボット
>>SMCの真空グリッパーをUR+に認証/ユニバーサルロボット
>>ウェブ上で協働ロボのセミナーを開催/ユニバーサルロボット
>>組み込み仕様の協働ロボットを発売/ユニバーサルロボット
>>難易度の高いパイプ溶接システムの実現に貢献/ユニバーサルロボット
>>導入検討の最初の一歩が“超”手軽に/ユニバーサルロボット
>>インドでBFWと提携/ユニバーサルロボット
>>協働ロボメーカーが日本支店を移転/ユニバーサルロボット
>>出荷台数2万5000台を記念して金色のロボ贈呈/ユニバーサルロボット


この記事を読んだ方へのオススメ記事









産業用ロボットに関する基礎知識 BASIC KNOWLEDGE
関連キーワード


ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年5月号の特集は「AIブームが広げる市場~成長領域のニーズに応えよ~」です。電子版も販売しております。詳しくは当欄の下部から。
