[気鋭のロボット研究者vol.30]位置検出に「光と影」を【前編】/産総研 栗田恒雄 研究グループ長
産業技術総合研究所(産総研)の栗田恒雄グループ長は、産業用ロボットなどの位置姿勢を高精度に検出する技術を開発した。10mm四方で深さ8mmの四角形の凹形状を「3DSマーカー」とし、4つの光源とウェブカメラを組み合わせた検出装置で内部の影を読み取る。その結果からカメラとマーカーの相対位置を検出する。工作機械やロボットなど、座標制御の生産財に幅広く応用できる。
位置検出精度が3μm、同姿勢精度が0.02度
産総研の栗田グループ長は昨年6月、位置姿勢の検出技術を発表した。
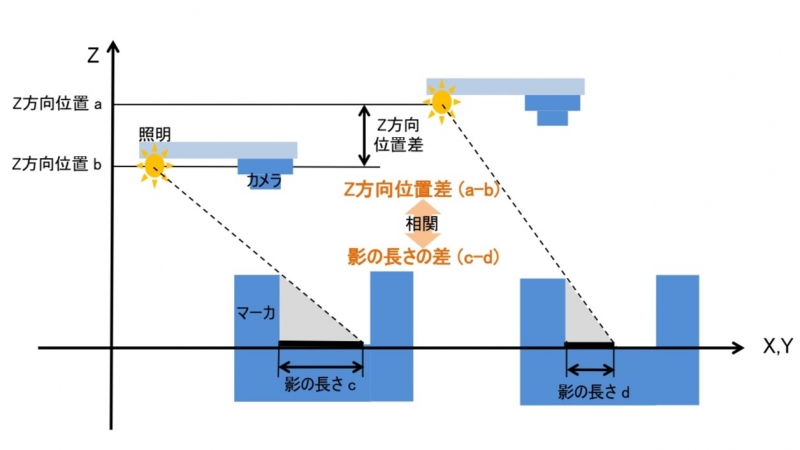
まず、3DSマーカーに接近した検出装置の光源の1つだけを点灯し、マーカーを照らす。すると、マーカーの底面に上面の縁の影ができる。
その影と光の境界線を画像認識で把握。位置姿勢の計算に必要となる境界線の交点などの特徴点を導き出す。今度は別の光源をつけ、同様の画像認識をする。
それらで求めた特徴点を使って計算すると、カメラとマーカー間の距離や角度が分かる。
約100回の実証の平均値は、位置検出精度が3μm、同姿勢精度が0.02度と高い精度を誇る。
応用の可能性は幅広い。例えば、産業用ロボットで工作機械に被加工材を取り付ける作業では、取り付けの精度を上げられる。
栗田グループ長は「生産現場で簡単かつ安価に使えるシステムを目指した」と話す。そのため、光源やウェブカメラは市販の物を使った。
現在は、生産現場での使いやすさを追究する。影の境界線を直線にするため、3DSマーカーの縁や角を垂直にする狙いで、当初はアルミニウム合金を形彫り放電加工機で加工した。最近では、マシニングセンタを使ってエンドミルで加工したマーカーでも、適切な画像処理を施せば、適用できる見通しを付けた。
栗田グループ長は「実際の生産現場の声を取り入れ、より使いやすい技術へと昇華させたい」と意気込む。
――後編に続く
(ロボットダイジェスト編集部 西塚将喜)
栗田恒雄(くりた・つねお)
1994年東京都立科学技術大学(現東京都立大学)工学部機械システム工学科卒、96年同大学大学院工学研究科力学系システム工学専攻修了。99年同大学院工学研究科工学システム専攻博士課程修了、博士(工学)。99年科学技術振興事業団特別研究員(マイクロ複合加工機の開発)。2002年産業技術総合研究所機械システム研究部門循環型生産システム研究グループ研究員、10年同主任研究員、22年から製造技術研究部門積層加工システム研究グループ研究グループ長。埼玉県出身の52歳。

この記事を読んだ方へのオススメ記事











産業用ロボットに関する基礎知識 BASIC KNOWLEDGE




ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年5月号の特集は「AIブームが広げる市場~成長領域のニーズに応えよ~」です。電子版も販売しております。詳しくは当欄の下部から。
