[気鋭のロボット研究者vol.30]「影」に着目のワケ/産総研 栗田恒雄 研究グループ長【後編】
産業技術総合研究所(産総研)の栗田恒雄研究グループ長は、産業用ロボットなどの位置姿勢を高精度に検出する技術を開発した。四角形の凹形状を「3DSマーカー」とし、ウェブカメラなどで内部の光と影の境界線を読み取り、その結果からカメラとマーカーの相対位置を検出する。栗田研究グループ長が安定した検出対象として、光と影に目を付けた理由とは。
段取り自動化の高精度化へ
栗田研究グループ長は位置姿勢を検出する技術を生み出した。
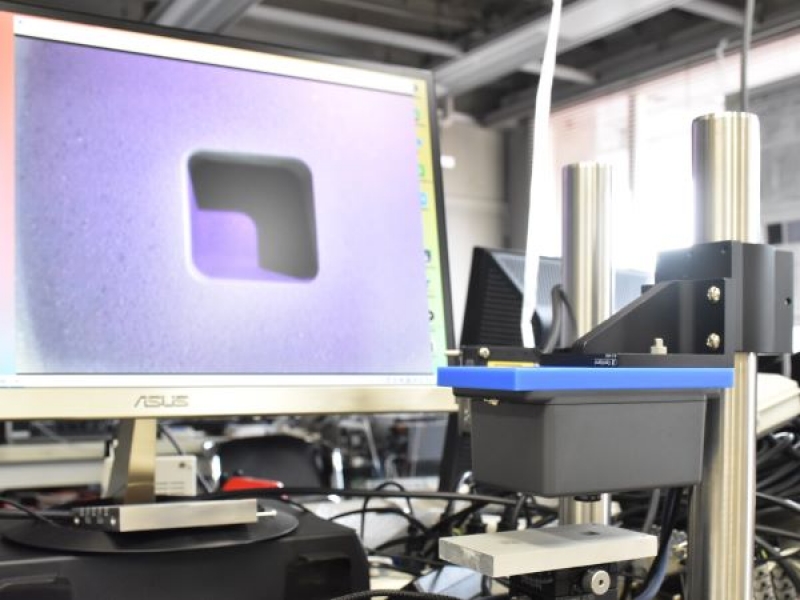
四角にくぼんだ3DSマーカーに光を当てる。すると、マーカーの底面に上面の縁の影ができる。その光と影の境界線の交点などの特徴点を導き出す。
それらを計算すると、カメラとマーカー間の距離や角度が分かる。
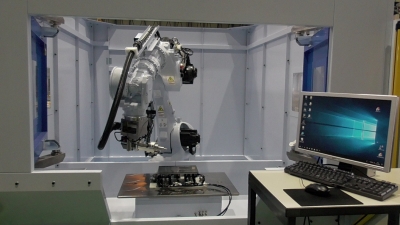
位置検出精度は3μmなど、高精度を誇る。工作機械やロボットなど、座標制御の生産財の位置補正に応用できる。
栗田研究グループ長は「微細精密な加工技術が専門。精密加工のためには段取り作業も重要となる。段取り作業の自動化の精度を高めるために開発した」と明かす。
鍵は「光と影」。安定した目印として、影に着目したのは、実は初めてではない。
「影はマーカーとして優れた性能」
栗田研究グループ長は、レーザー加工を中心に、複数の加工要素を取り入れた複合加工の研究に長年取り組んできた。
その一環で、直径0.12mmのステンレス合金の棒材に、らせん状の溝加工をした経験がある。旋盤のように加工対象物(ワーク)を回転させながら、切削工具の代わりにレーザー光で加工する装置を考案した。
その際にワークの振れが課題だった。普通旋盤で長尺のワークを加工するような両持ち構造にすると、微小な外乱要因でワークが損傷する恐れがある。そこで、片持ちで振れたままのワークにレーザーヘッドを追従させて加工しようと考えた。
追従させるために、加工用のレーザー光の出力を弱めてワークに当て、その影を集光用の光学装置の中に組み込んだカメラで認識する方法にたどり着いた。
「光源とワーク、カメラの関係が安定していれば、影はマーカーとして優れた性能を持つと気付いた」と振り返る。
位置姿勢を高精度に検出する技術は今後、多くの企業と連携しながら、生産現場で簡単かつ安価に使えるシステムとして、応用事例を増やしていく考えだ。
――終わり
(ロボットダイジェスト編集部 西塚将喜)
栗田恒雄(くりた・つねお)
1994年東京都立科学技術大学(現東京都立大学)工学部機械システム工学科卒、96年同大学大学院工学研究科力学系システム工学専攻修了。99年同大学院工学研究科工学システム専攻博士課程修了、博士(工学)。99年科学技術振興事業団特別研究員(マイクロ複合加工機の開発)。2002年産業技術総合研究所機械システム研究部門循環型生産システム研究グループ研究員、10年同主任研究員、22年から製造技術研究部門積層加工システム研究グループ研究グループ長。脳のさまざまな箇所の活性化を期待して、野球やサッカー、吹奏楽、スキー、柔術など幅広い趣味を持つ。競技の良さを一歩踏み込んで感じたいので、少し上手な「偏差値55」を目指す。埼玉県出身の52歳。


この記事を読んだ方へのオススメ記事









産業用ロボットに関する基礎知識 BASIC KNOWLEDGE
関連キーワード

ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年8月号の特集は「飛躍する中堅・中小~100億に向け攻める経営~」です。電子版も販売しております。詳しくは当欄の下部から。
