[気鋭のロボット研究者vol.2]力触覚技術で産業界を変える/慶応義塾大学野崎貴裕専任講師【後編】
前編では野崎貴裕専任講師が中心となって開発した双腕ロボット「ジェネラル・パーパス・アーム(GPアーム)」を紹介した。後編ではGPアームで使われた技術の応用の可能性などを紹介する。「画像解析や音声分析など、視覚や聴覚に関する技術は産業界で活用されているが、触覚はまだ実用化されていないブルーオーシャン(未開拓の領域)」と野崎専任講師は話す。
さまざまな応用の可能性
「GPアームに採用した、触覚を伝達する力触覚技術や位置制御と力の制御を両立する技術は、さまざまな応用の可能性がある」と野崎貴裕専任講師は言う。
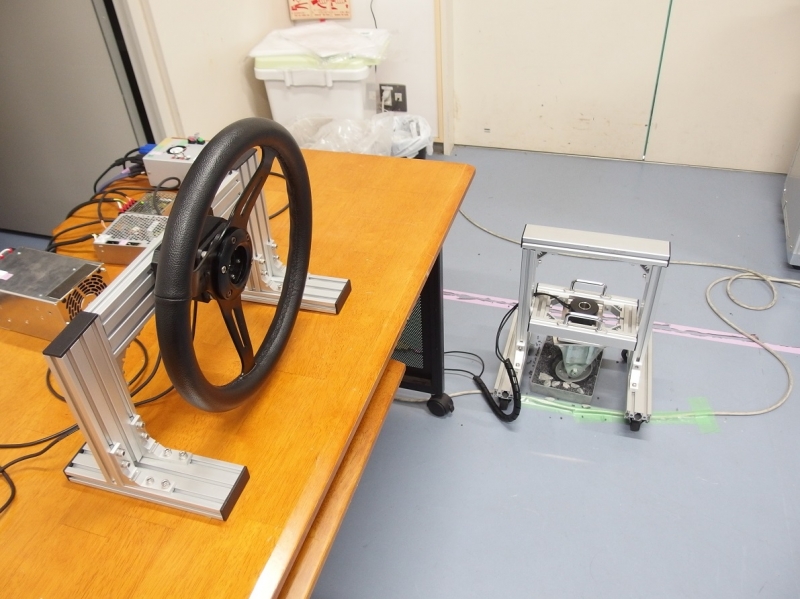
GPアームではロボットのアームやハンドの動きを制御したが、モーターで動くものならば直線1軸だけものや、ハンドルとタイヤを連動させたシステムなど、さまざまなものに適用できる。
ハンドルとタイヤを連動させたシステムでは、車輪の向きを変えた際の周囲の小石一つ一つの感触までハンドルを持つ手に感じられ、自動車に応用すれば運転者が路面の情報を把握でき運転しやすくなる。圧力の増幅や低減なども可能だ。

産業用ロボットでは力触覚技術を利用して一度操作したデータを保存すれば、次からは人がいなくても自動で同様の動作の繰り返しが可能だ。
果物など強くつかめず個体差もある物を搬送でき、繊細な力加減は保ったまま動作速度だけ数倍に高めることもできる。また形状や色が全く一緒の樹脂ブロックとマシュマロなど、見ても分からないが触れば分かるものの判別にも使える。
「作業動作のデータが大量に集まれば、スマートフォンで動画を見るのと同じように、ネットワーク上の必要な動作データをロボットで再生するIoA(動作のインターネット)の時代になる。音楽を聞きたい時に音楽家を呼ばないのと同じこと」。
現在、産業界での実用化に向け45社と共同研究を進しており「目が回るほど忙しい」と笑顔で語る。
——終わり
(ロボットダイジェスト編集部)
野崎貴裕(のざき・たかひろ)慶応義塾大学専任講師2010年3月慶應義塾大学理工学部卒。12年3月同大学院理工学研究科修士課程修了。14年3月同博士課程修了。14年3月横浜国立大学大学院研究教員。15年4月慶応義塾大学助教、18年4月より現職。「CEATEC2016審査委員特別賞」、「S-Booster2017審査員特別賞」など受賞。東京都出身の31歳。※この記事は「月刊生産財マーケティング」2018年10月号に掲載した連載「今に花咲き実を結ぶ」を再編集したものです。


この記事を読んだ方へのオススメ記事










産業用ロボットに関する基礎知識 BASIC KNOWLEDGE

ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年7月号の特集は「変種変量時代の勝てる現場~柔軟性と生産性を両立する鍵~」です。電子版も販売しております。詳しくは当欄の下部から。
