更新日時: 2025/07/17

シュマルツ
Schmalz
シュマルツはドイツに本社を置く真空搬送機器専門メーカーです。
自動搬送用真空機器、自動搬送用真空グリッパー、手動搬送システム、加工機用真空クランプシステムなどを取り扱っています。
お求めやすいお値段でご用意している標準吸着パッドから、各産業から寄せられる特有のニーズを基に開発したユニークな真空機器まで、幅広いソリューションをご用意。
お困りの際はぜひシュマルツまでお問合せ下さい。お客様へ「ベスト・ソリューション」をご提案します!
最新の掲載記事
ロボット・周辺機器

軽量真空グリッパー FQE-V
吸着面形状を自由に設計可能なオーダーメイド式軽量ハンド
ボディ成形を3Dプリンタ出力で行うこのグリッパーは、吸着面のサイズや形状を自由に設計注文でき、ワンストップで完成製品にしてお届けできます。このグリッパーを使えば、たとえ対象ワークが特殊形状であったとしても、ワーク変形を抑えつつ保持力を最大限に高め、安定した搬送が可能です。ISO/TS 15066に準拠、人協働環境で安心して使用できます。
各社協働ロボットに対応した取付用フランジやケーブル等が含まれるロボセットを選択することで、簡単に取り付け・セットアップが可能です。
- ■ 特徴/ポイント:
- ボディ成形を3Dプリンタ出力で行うこのグリッパーは、吸着面のサイズや形状を自由に設計注文でき、ワンストップで完成製品にしてお届けできます。このグリッパーを使えば、たとえ対象ワークが特殊形状であったとしても、ワーク変形を抑えつつ保持力を最大限に高め、安定した搬送が可能です。ISO/TS 15066に準拠、人協働環境で安心して使用できます。
各社協働ロボットに対応した取付用フランジやケーブル等が含まれるロボセットを選択することで、簡単に取り付け・セットアップが可能です。
- ■ 仕様:
-
- ■ 製品動画:

真空グリッパーFQE
産業用・協働ロボットどちらにも使える、小型汎用ロボットハンド
真空グリッパー FQEは、小型かつ軽量な汎用吸着ロボットハンドです。ISO/TS 15066に準拠した丸みを帯びた形状になっており、産業用ロボットによる自動搬送工程のみならず、協働ロボットを使った人協働作業にも適しています。
スポンジフォームないし吸着パッドによる吸着が可能で、様々なサイズや形状のワークに対し、柔軟に把持することができます。包装品・自動車部品・ガラス・電子半導体部品の搬送や、生産ライン終盤での段ボールパレタイジングなど、幅広い用途で使用いただけます。
- ■ 特徴/ポイント:
- 真空グリッパー FQEは、小型かつ軽量な汎用吸着ロボットハンドです。ISO/TS 15066に準拠した丸みを帯びた形状になっており、産業用ロボットによる自動搬送工程のみならず、協働ロボットを使った人協働作業にも適しています。
スポンジフォームないし吸着パッドによる吸着が可能で、様々なサイズや形状のワークに対し、柔軟に把持することができます。包装品・自動車部品・ガラス・電子半導体部品の搬送や、生産ライン終盤での段ボールパレタイジングなど、幅広い用途で使用いただけます。
- ■ 仕様:
-
- ■ 製品動画:

サックグリッパー PSSG
化学薬品・食料品・肥料などが入った重い袋のロボ搬送に最適!
重たい袋荷のロボット搬送を可能にする シュマルツ サックグリッパー PSSG は、各種協働ロボットで簡単・便利にお使いになれます。
袋のパレタイジング・デパレタイジングに適しており、クラフト袋など通気性のある袋や充填量が少なく変形しやすい袋の搬送も可能です。
把持部は、食品等の入った袋の搬送に好適なFDA準拠シリコーンゴムリップ、耐摩耗のニトリルゴムリップの2種から選択できます。
- ■ 特徴/ポイント:
- 重たい袋荷のロボット搬送を可能にする シュマルツ サックグリッパー PSSG は、各種協働ロボットで簡単・便利にお使いになれます。
袋のパレタイジング・デパレタイジングに適しており、クラフト袋など通気性のある袋や充填量が少なく変形しやすい袋の搬送も可能です。
把持部は、食品等の入った袋の搬送に好適なFDA準拠シリコーンゴムリップ、耐摩耗のニトリルゴムリップの2種から選択できます。
- ■ 仕様:
-
- ■ 製品動画:

軽量レイヤーグリッパー ZLW
軽可搬ロボットによるパレタイジング・デパレタイジングを実現
軽量レイヤーグリッパー ZLW は、軽可搬の産業用ロボットや協働ロボットを使用したパレタイジング・デパレタイジングに最適なロボットハンドです。
軽量かつ高剛性な躯体を採用しペイロードに占めるハンド自重を可能な限り削減したことで、軽可搬ロボットの能力を最大まで引き出すことができます。人協働環境におけるパレタイズ・デパレタイズに最適です。段ボール箱などの包装品、瓶などの容器、様々な対象の搬送実績がございます。
- ■ 特徴/ポイント:
- 軽量レイヤーグリッパー ZLW は、軽可搬の産業用ロボットや協働ロボットを使用したパレタイジング・デパレタイジングに最適なロボットハンドです。
軽量かつ高剛性な躯体を採用しペイロードに占めるハンド自重を可能な限り削減したことで、軽可搬ロボットの能力を最大まで引き出すことができます。人協働環境におけるパレタイズ・デパレタイズに最適です。段ボール箱などの包装品、瓶などの容器、様々な対象の搬送実績がございます。
- ■ 仕様:
-
- ■ 製品動画:
モジュール式グリッパーシステム PXT
組み換え容易な軽量ロボットハンド
モジュール式グリッパーシステム PXTは、アプリケーションに合わせて柔軟にハンドを構成することができるグリッパーシステムです。標準化された部品を組み合わせることで、幅広いハンドリングソリューションを実現することができます。フレーム内部を真空回路として使用することができ、使いやすさと実用性を最大限に引き出します。組立や改造はわずかな工具で素早く簡単に行えます。軽量・協働ロボットとの組み合わせに最適です。
- ■ 特徴/ポイント:
- モジュール式グリッパーシステム PXTは、アプリケーションに合わせて柔軟にハンドを構成することができるグリッパーシステムです。標準化された部品を組み合わせることで、幅広いハンドリングソリューションを実現することができます。フレーム内部を真空回路として使用することができ、使いやすさと実用性を最大限に引き出します。組立や改造はわずかな工具で素早く簡単に行えます。軽量・協働ロボットとの組み合わせに最適です。
- ■ 仕様:
-
- ■ 製品動画:

コンパクトポンプ GCPi
DC24V給電すればどこでも吸着搬送が実現できる小型電気式真空ポンプ!
コンパクトポンプ GCPiは、圧縮エア不要、DC24V電源のみで駆動する小型電気式真空発生器です。
可動式架台と協働ロボを併用するケースや、自律走行搬送システムAGV/AMRやスタッカークレーン等、工場エア利用が難しくなる様々な環境で、エアレスで吸着搬送を実現できます。省エネ機能によりエネルギー消費を最小に抑える様自律制御します。タッチパネル付きで設定が簡単にできます。
- ■ 特徴/ポイント:
- コンパクトポンプ GCPiは、圧縮エア不要、DC24V電源のみで駆動する小型電気式真空発生器です。
可動式架台と協働ロボを併用するケースや、自律走行搬送システムAGV/AMRやスタッカークレーン等、工場エア利用が難しくなる様々な環境で、エアレスで吸着搬送を実現できます。省エネ機能によりエネルギー消費を最小に抑える様自律制御します。タッチパネル付きで設定が簡単にできます。
- ■ 仕様:
-
- ■ 製品動画:

マグネットグリッパー SGM-SV-BY
Ø46 mm円筒形リチウムイオン電池セルを安全かつ正確に搬送!
"4680"などに代表される46mm径のリチウムイオンバッテリー(LiB)を、安全かつ正確に天面把持し搬送することができるマグネットグリッパーです。メカチャックや吸着パッドでアプローチしづらい、俵型に集積したタブレスバッテリーも、このグリッパーを使えば難なく丸ごと搬送できます。エア複動式・メタルタッチ防止設計・近接センサ取付等、LiB搬送の確実性を高める工夫を全て盛り込みました。
- ■ 特徴/ポイント:
- "4680"などに代表される46mm径のリチウムイオンバッテリー(LiB)を、安全かつ正確に天面把持し搬送することができるマグネットグリッパーです。メカチャックや吸着パッドでアプローチしづらい、俵型に集積したタブレスバッテリーも、このグリッパーを使えば難なく丸ごと搬送できます。エア複動式・メタルタッチ防止設計・近接センサ取付等、LiB搬送の確実性を高める工夫を全て盛り込みました。
- ■ 仕様:
-
- ■ 製品動画:

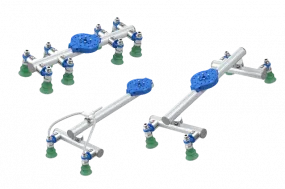
レイヤー搬送システム SPZ
ロボットパレタイジングへの強力な解決策
レイヤー搬送システム SPZは、段ボール/缶/ビン/重量袋など各種ワークを扱うパレタイジング・デパレタイジング工程などで、レイヤー(パレット積み付け1段分のワーク全て)をまるごと一括で真空吸着し移載することが可能なロボットハンドシステムです。注文設計により、吸着面の面積、吸着面のゾーニング(エリア分け)やロボットフランジなどを合わせこんで製作納品いたしますので、導入コスト・ランニングコストを最大限圧縮でき経済的です。事前のワークテストにも対応いたします。
- ■ 特徴/ポイント:
- レイヤー搬送システム SPZは、段ボール/缶/ビン/重量袋など各種ワークを扱うパレタイジング・デパレタイジング工程などで、レイヤー(パレット積み付け1段分のワーク全て)をまるごと一括で真空吸着し移載することが可能なロボットハンドシステムです。注文設計により、吸着面の面積、吸着面のゾーニング(エリア分け)やロボットフランジなどを合わせこんで製作納品いたしますので、導入コスト・ランニングコストを最大限圧縮でき経済的です。事前のワークテストにも対応いたします。
- ■ 仕様:
-
- ■ 製品動画:

コボットポンプECBPi
DC24V給電のみで吸着把持ができる、ハンド型ポンプユニット
コボットポンプECBPiは、圧縮エアを必要としない電動真空発生器です。協働ロボットやモバイルロボットの手先に取り付け、電気を供給することでワークピースを吸着把持することが可能です。自動調圧機能は標準搭載、NFCまたはIO-Linkによるパラメータ設定機能も備えています。各種協働ロボットに取り付けるためのフランジ
- ■ 特徴/ポイント:
- コボットポンプECBPiは、圧縮エアを必要としない電動真空発生器です。協働ロボットやモバイルロボットの手先に取り付け、電気を供給することでワークピースを吸着把持することが可能です。自動調圧機能は標準搭載、NFCまたはIO-Linkによるパラメータ設定機能も備えています。各種協働ロボットに取り付けるためのフランジ
- ■ 仕様:
-
- ■ 製品動画:

電動ロープバランサー NEO30
荷物の運搬をスマートに。どこでも使えるバッテリー式助力装置!
シュマルツ NEO 30 は、最大 30 kg までの荷物を持ち上げることができる電動式ロープバランサーです。ハンドルをわずかに上下させるだけで、ワークをラクに昇降でき、任意の位置で静止させることも可能です。バッテリー式のため、電気配線やエア配管などユーティリティーによる場所の制約を受けることなく、どこでもすぐに設置して使用することができます。
- ■ 特徴/ポイント:
- シュマルツ NEO 30 は、最大 30 kg までの荷物を持ち上げることができる電動式ロープバランサーです。ハンドルをわずかに上下させるだけで、ワークをラクに昇降でき、任意の位置で静止させることも可能です。バッテリー式のため、電気配線やエア配管などユーティリティーによる場所の制約を受けることなく、どこでもすぐに設置して使用することができます。
- ■ 仕様:
-
- ■ 製品動画:
企業概要
- 会社名
- シュマルツ
- 住所/Address
- 〒224-0027神奈川県横浜市都筑区大棚町3001-7
- TEL
- 045-565-5150






ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年6月号の特集は「RTJで“現場”が変わる!~最新ソリューションは愛知に~」です。電子版も販売しております。詳しくは当欄の下部から。
