[気鋭のロボット研究者vol.21]実用に重要な「臨機応変さ」【後編】/青山学院大学 田崎良佑准教授

田崎良佑准教授は、ガントリーローダーの制振にも取り組む。もともと、学部生時代には建築物の制振技術やそのシミュレーションに熱中。その後、修士課程から実際に物体を動かして研究する楽しさと大切さに気付き、本格的にロボットや自動化装置の研究を始めた。そんな田崎准教授の経験が生きるのが、この研究だ。
経験生かすローダーの制振技術
田崎准教授は、修士課程からロボットや工場自動化(FA)関連の研究を本格的に始めた。それまでは、シミュレーション上でビルの揺れを制御する研究などをしており、進路の選択を大きく変えた。
双方の知識を生かしたのが、工場の天井付近や工作機械の上部などに取り付けるガントリーローダーの研究だ。
ローダーを急に加減速させると、揺れが生じる。そのため、一般的なローダーの支柱などの主要部には剛性が必要となり、太い。他方、制振システムでローダーの振れを生じさせずに済むと、構造物自体を簡素にでき、設置スペースを省ける。
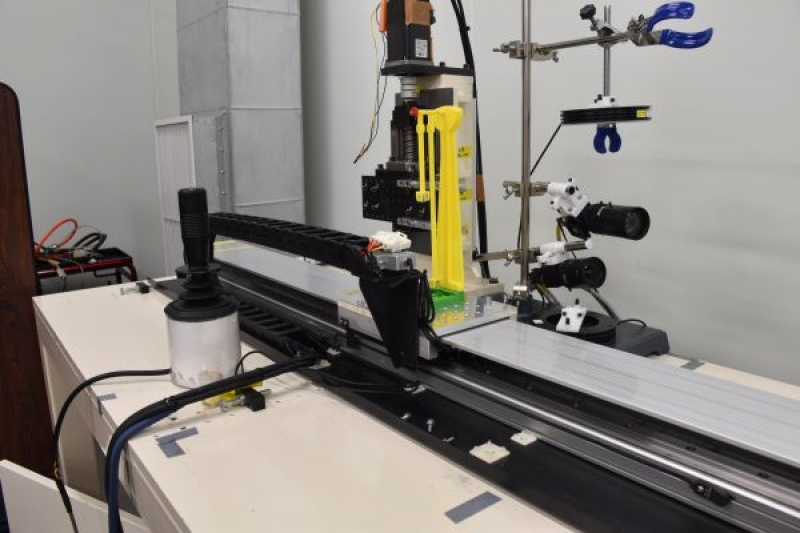
そこで、構造物の振動対策に有効な制振制御の装置と搬送方法を研究する。揺れと反対方向に荷重をかけて揺れを抑える「アクティブマスシステム」と、独自の搬送方法を組み合わせて、高速でも揺れを生じないローダーをメーカーと共同で開発中だ。
「シミュレーション上では制振できても、現実では想定外の外乱要因で失敗することも少なくない。もし、外乱要因に対応する臨機応変さをロボットに備えられれば、一般でもロボットを活用しやすくなる」と考える。
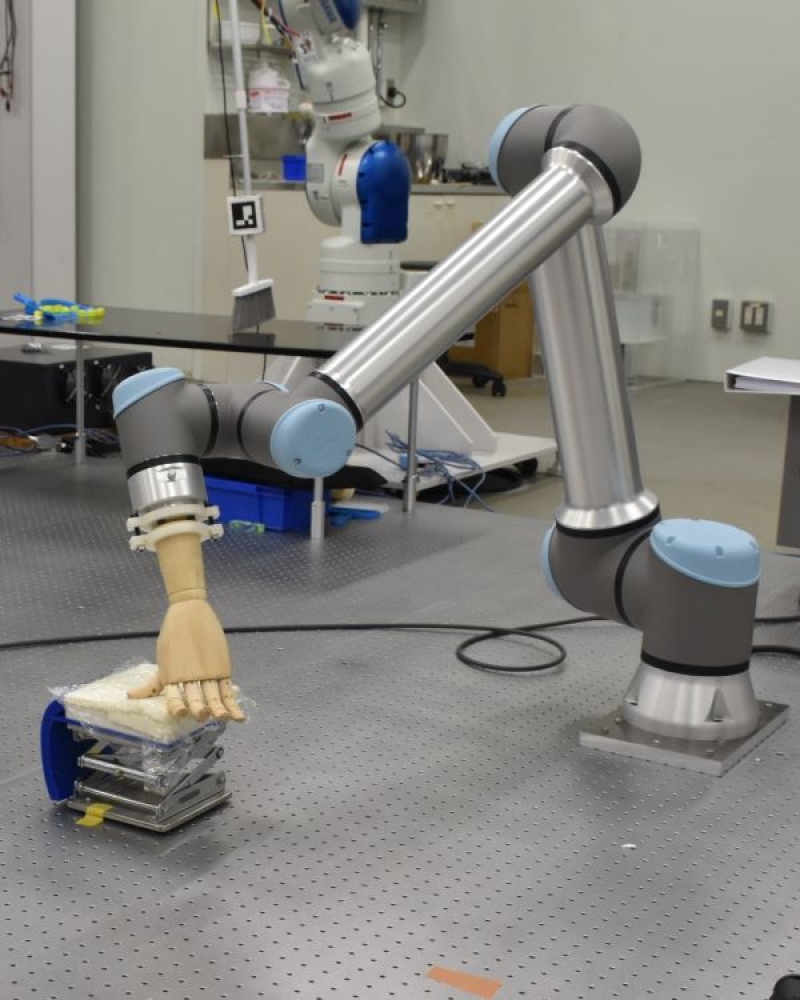
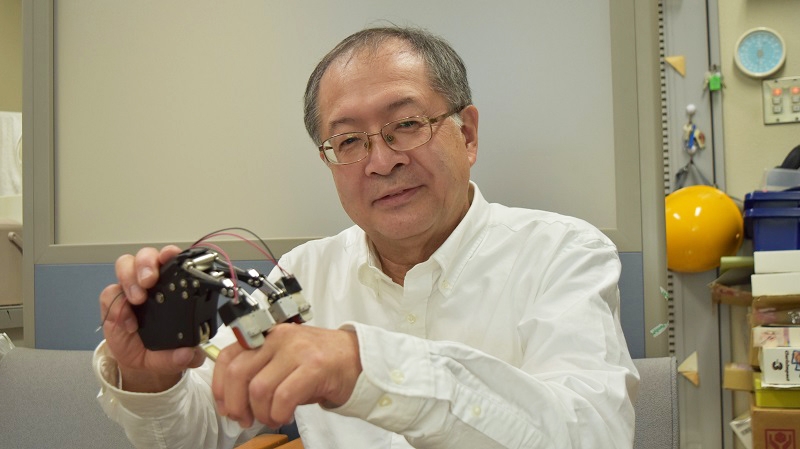
そこで、臨機応変なロボットシステムの研究にも注力しており、人を指圧マッサージするロボットシステムの開発を進める。
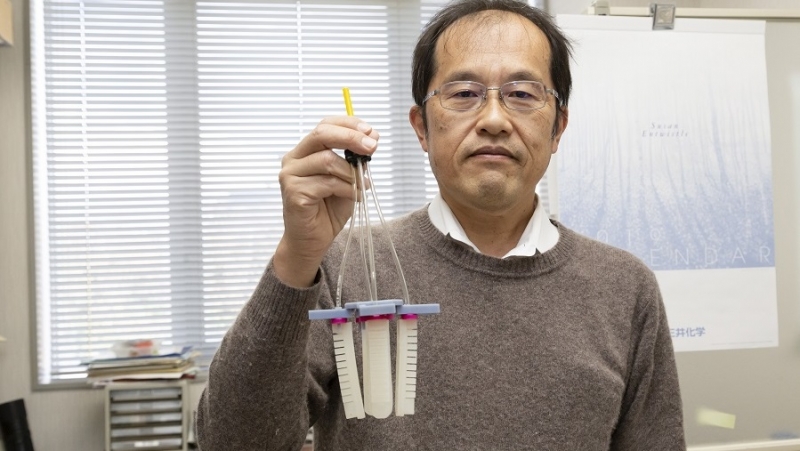
ロボットハンドなどに新開発の各種センサーを搭載して認識することで、指圧されると痛い骨や腱(けん)の周りを避け、凝った筋肉をほぐす。
「個々人の多種多様な身体状態に対して、3次元の画像センサーで得た外観形状情報とロボットハンドによる触診情報から、凝った筋肉の部位を認識して適切に施術する。求められる対応力は非常に高く、成功すれば触覚を中心に応用研究の対象も広いはず」と、将来を見据える。
――終わり
(ロボットダイジェスト編集部 西塚将喜)
田崎良佑(たさき・りょうすけ)
2004年小山工業高等専門学校機械工学科卒。06年京都工芸繊維大学工芸学部機械システム工学科卒。08年豊橋技術科学大学大学院生産システム工学専攻修士課程修了、11年同電子・情報工学専攻博士課程修了後、研究員を経て12年同大学機械工学系助教。19年から青山学院大学理工学部機械創造工学科准教授(現職)。日本鋳造工学会で各種幹事などを歴任。豊橋技術科学大学在籍時に鋳造の奥深さに魅了され、その加工技術の追究をライフワークに掲げる。1983年栃木県生まれの38歳。
※この記事の再編集版は、設備財や工場自動化(ファクトリーオートメーション=FA)の専門誌「月刊生産財マーケティング」2021年11月号にも掲載。


この記事を読んだ方へのオススメ記事




産業用ロボットに関する基礎知識 BASIC KNOWLEDGE

ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年7月号の特集は「変種変量時代の勝てる現場~柔軟性と生産性を両立する鍵~」です。電子版も販売しております。詳しくは当欄の下部から。
