[気鋭のロボット研究者vol.26] 見ず触れず検知するロボットハンド【前編】/大阪大学 小山佳祐助教
大阪大学の小山佳祐助教は、ワーク(搬送物)との距離や角度を非接触で検知する近接覚センサーを研究する。透明や光沢のあるワークでも検知できるのが特徴。ロボットハンドに搭載することで、カメラを使わず手探りでワークをつかむこともでき、従来よりもシンプルで柔軟なバラ積みピッキングシステムを実現する。
ハンドがワークに追従

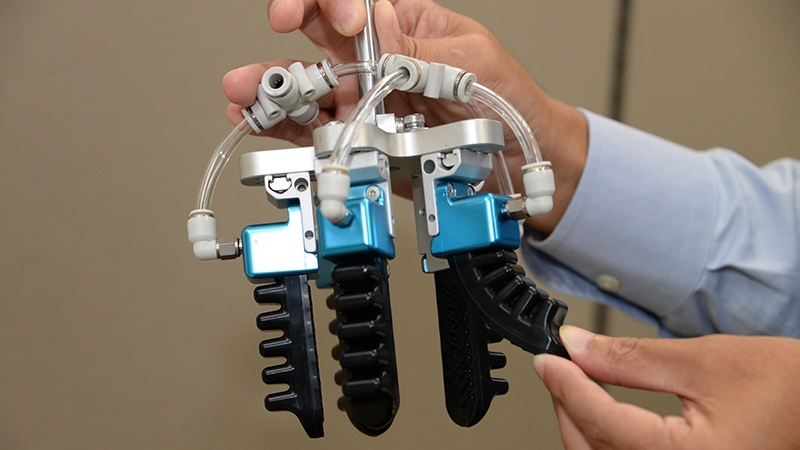
小山佳祐助教が開発した近接覚センサーは、0.5度の角度、0.1mmの距離の変化を非接触で検知する。センサーにLEDの発光部と受光部が組み込まれ、検知した反射光を人工知能(AI)が解析して計測する仕組みだ。
AIで解析するデータ量を最小限にすることで、瞬時に計測できるのが特徴。ロボットハンドに組み込むと、動くワークの傾きや距離に合わせ、連続的に追従することができる。カメラを使って同じ動きをさせようとすると、画像の情報量が多く、リアルタイムで処理することが難しい。
光沢あっても、透明でも
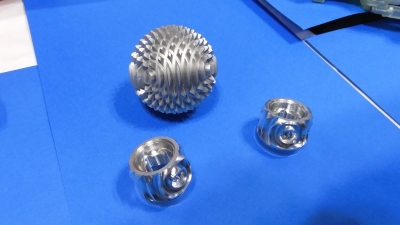
光沢のある金属や透明なプラスチックでも認識する。データに特別な補間処理をすることで実現した。小山助教は「反射光を使うセンサーは1970年代から研究されてきたが、AIそのものとAIを活用する技術が進歩したことで可能になった」と話す。
今年8月に設立したThinker(シンカー、大阪市中央区、藤本弘道社長)は、小山助教が取締役を務め、近接覚センサーを使った製品やソリューションの開発を主な事業とする。近接覚センサーそのものは2023年に発売する予定で、現在は製品に近い試作品を検証中だ。「ハードの精度を追求し過ぎると複雑なシステムになってしまう。ソフトで適切に補い、量産に適したバランスに調整した」と小山助教。
後編では、近接覚センサーを使ったピッキングシステムの例を紹介する。
――後編に続く
(ロボットダイジェスト編集部 松川裕希)
小山佳祐(こやま・けいすけ)
2017年電気通信大学大学院情報理工学研究科知能機械工学専攻博士課程修了、博士(工学)。同年東京大学大学院情報理工学系研究科特任助教、19年10月客員研究員。19年4月大阪大学大学院基礎工学研究科招聘教員、10月助教。日本機械学会会員、日本ロボット学会会員、計測自動制御学会会員。電子工作や鉱物結晶のDIYが趣味。和歌山県出身の32歳。


この記事を読んだ方へのオススメ記事






産業用ロボットに関する基礎知識 BASIC KNOWLEDGE




ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年7月号の特集は「変種変量時代の勝てる現場~柔軟性と生産性を両立する鍵~」です。電子版も販売しております。詳しくは当欄の下部から。
