軟らかいものをどうつかむ? ~ソフトハンド開発動向【後編】
軟らかい物をハンドリングする技術は研究者にとっても大きなテーマだ。ソフトロボティクスと呼ばれる分野の重要なテーマの一つとして研究が進められている。前編で紹介したソフトハンドはエアで駆動する多指ハンドばかりだったが、研究レベルでは、その構造をさらに発展させたものや、全く異なるアプローチのハンドもある。後編では、ソフトハンド開発の最前線の3つの研究事例を紹介する。
シンプルな構造で低コスト
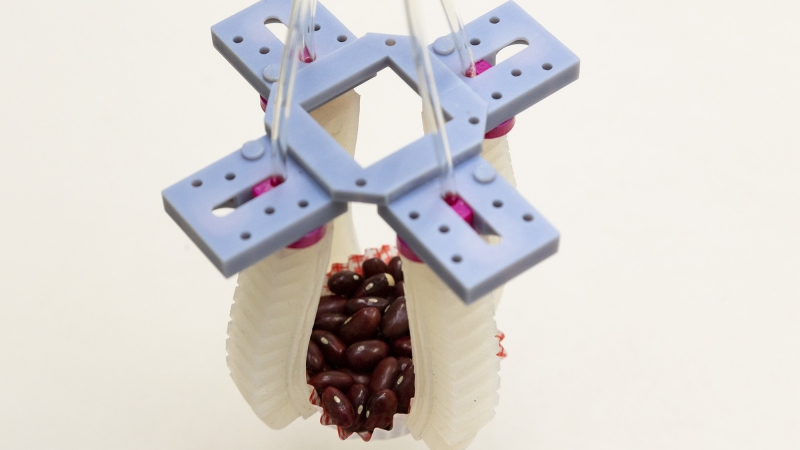
立命館大学理工学部の平井慎一教授は、ソフトロボティクス研究の先駆者の一人。エアで動作する多指ハンドだが、3Dプリンターで樹脂製の指を製造しており製造コストが低い。
「食品工場で使うソフトハンドは、傷んだら惜しまず捨てられるほどコストが低くなければならない」と話す。
3Dプリンターを現場に設置できれば、ロボットが稼働するそばで指を製作でき、交換しやすい。
課題は、3Dプリンターで造形する樹脂は安全性が確認されていないため、直接造形した指は食品工場では使えない点。安全を確保するには、3Dプリンターで指の型を製作し、シリコンなどで指を成形する。
「構造の複雑なものは、優れていても普及しにくい。構造や制御がシンプルで、メンテナンスしやすいソフトハンドを追求したい」と語る。
タコの吸盤に学ぶ
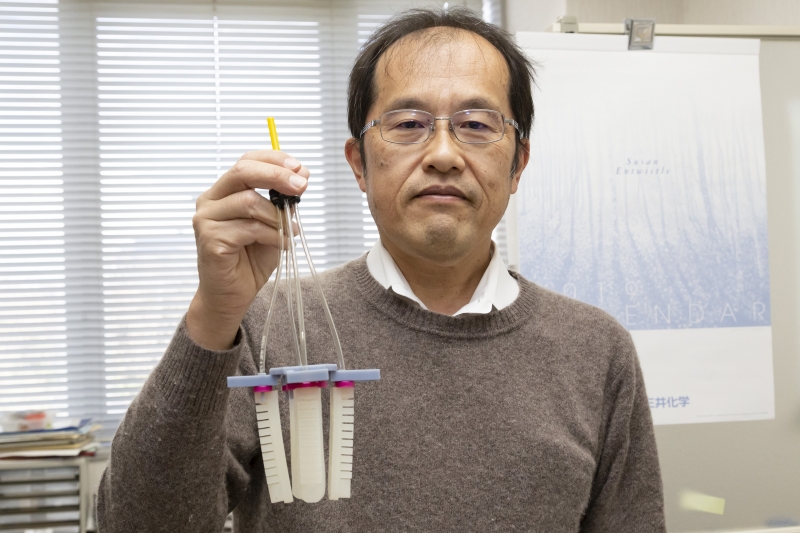
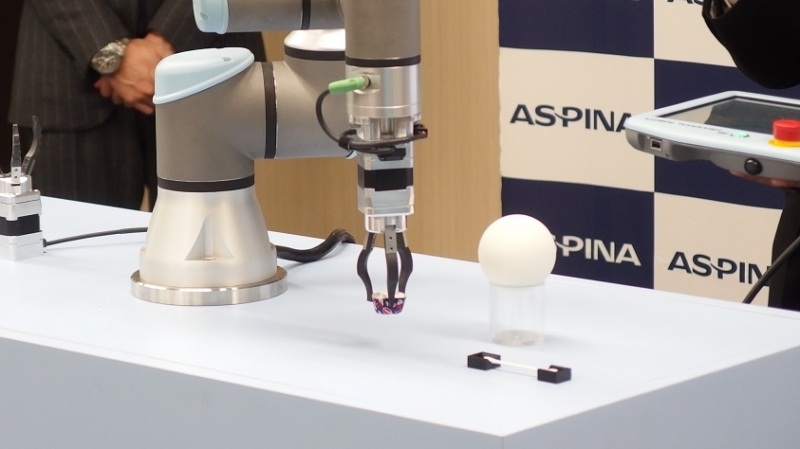
関西大学システム理工学部の高橋智一准教授は、軟らかいものをつかむ力として負圧を利用する方法を研究する。その一つが、タコの吸盤をまねた真空吸着グリッパーだ。タコの吸盤が強力に吸い着くのは、つかむものに密着させた後に内部の空間を広げて負圧を生み出すからだ。
この真空吸着グリッパーは筒状の本体底面が薄膜になっており、真空ポンプで内部を減圧すると、つかむものと薄膜の隙間に強い負圧が生まれ、物を吸い付ける。固いものなら最大5kg、軟らかいものは最大1kg程度まで持ち上げられる。多指ハンドではサイズ的につかみにくい大袋もハンドリングできる。

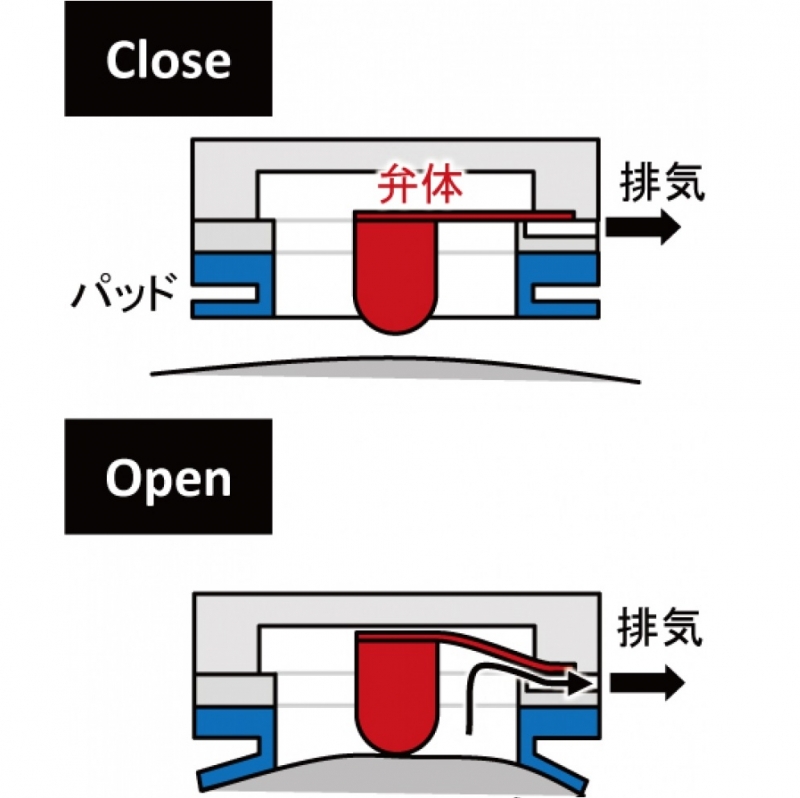
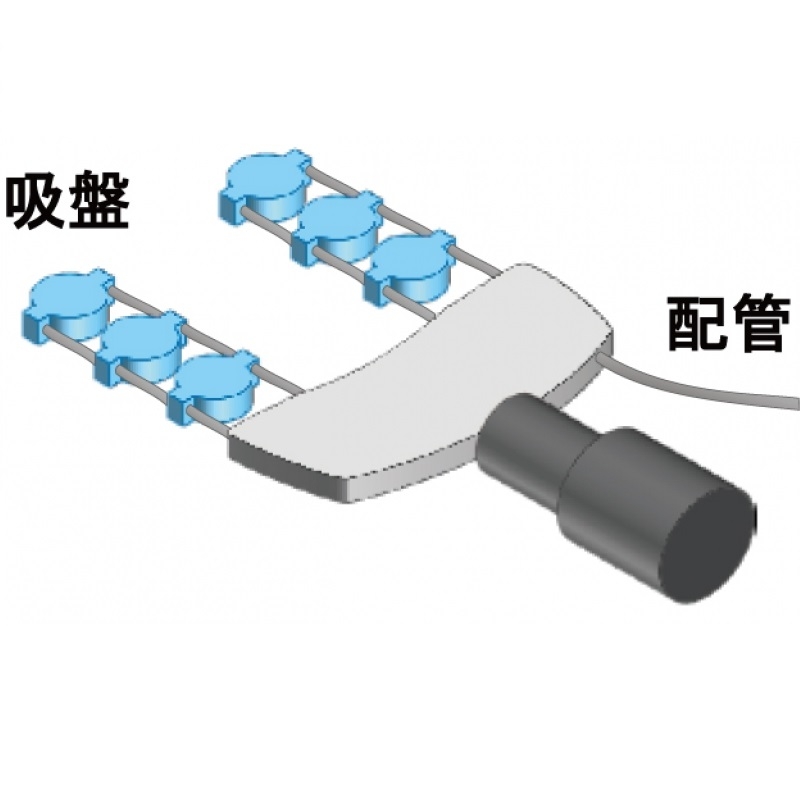
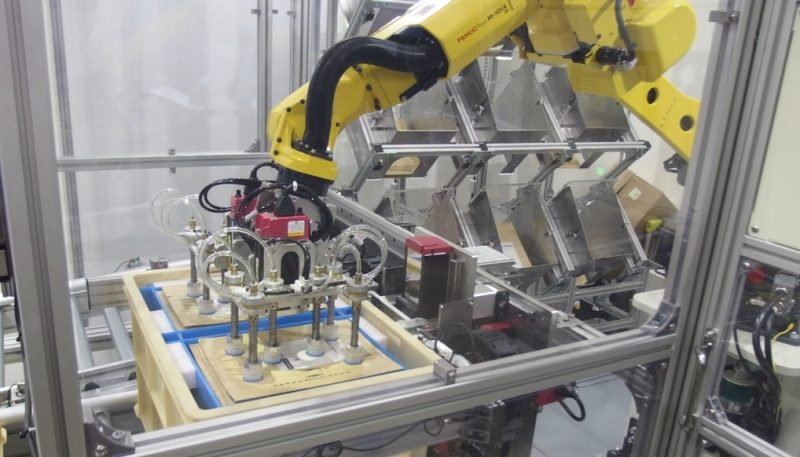
また、極小のバルブ(マイクロバルブ)を備えた小さな吸盤も研究する。吸盤が物に軽く触れるとマイクロバルブが開いて吸気し、吸盤内が減圧してものを吸着する。一つ一つの吸盤のつかむ力は大きくないので、直列に並べて吸着力を高めて使う。
小さな吸盤を並べてつかむグリッパーはすでにあったが、従来は一つの吸盤が外れるとエアの漏れが止まらず、グリッパー全体が吸着力を失うという欠点があった。高橋准教授が開発したグリッパーでは吸盤が外れたらマイクロバルブが閉じるため、グリッパー全体の吸着力は維持される。
物を落としにくい特性が評価され、医療関係者から関心を寄せられたことも。「手術で臓器を持ち上げておく時に使いたいとの相談を受けた」と言う。今後の課題は、部品点数を減らすこと。耐久性を上げ、コスト削減にもつながる。


この記事を読んだ方へのオススメ記事






産業用ロボットに関する基礎知識 BASIC KNOWLEDGE

ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年7月号の特集は「変種変量時代の勝てる現場~柔軟性と生産性を両立する鍵~」です。電子版も販売しております。詳しくは当欄の下部から。
