[気鋭のロボット研究者vol.5]やわらかハンドでおかず詰めを自動化【前編】/立命館大学平井慎一教授
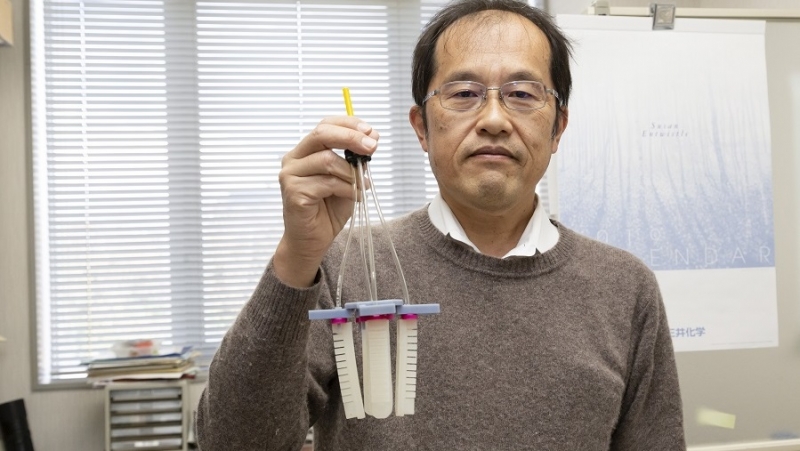
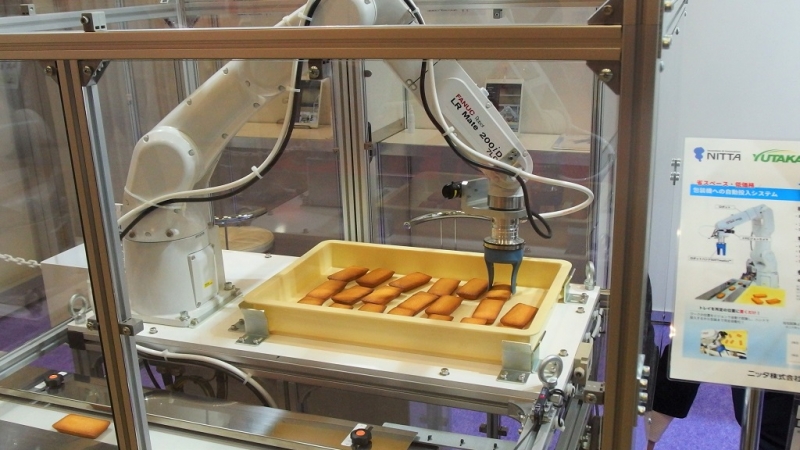
現実にある問題を出発点として研究を進める平井慎一教授。ソフトロボティクスを研究する平井教授が着目したのは、コンビニエンスストアなどの弁当におかずを詰める作業の自動化だ。産業用ロボットのハンドとしては珍しい、3Dプリンターを使って製作した「ソフトハンド」を研究する。2020年の実用化に向けテスト運用を始める。
人手不足を背景に高い自動化ニーズ
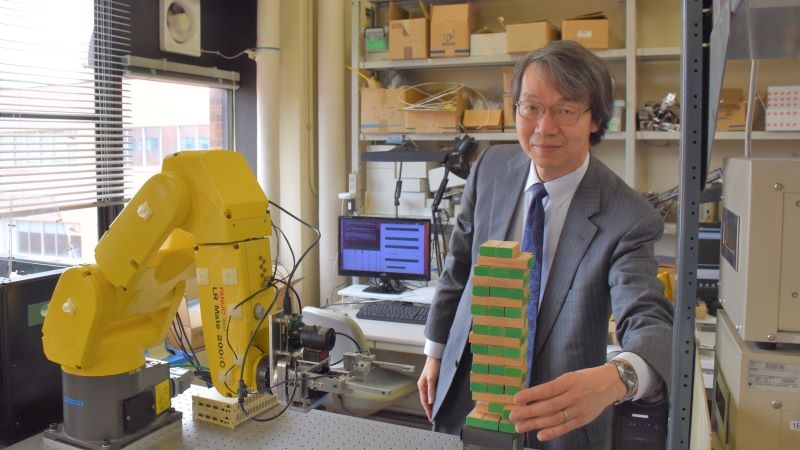
「自分は、現実の課題を出発点とするタイプの研究者」と話す平井慎一教授。柔らかいものをハンドリングするソフトロボティクス研究の先駆者の1人だ。
平井教授が着目するのは、コンビニなどで売られる弁当におかずを詰める作業の自動化だ。
基本的に日持ちしないので、弁当を製造する工場は大きな消費地である都市の近くに置かざるを得ない。すると人件費が高騰し、採用自体も難しくなり、ここ数年で人材不足が深刻化している。
おかずの入ったカップに着目
工場を実際に視察した平井教授は「製造ラインはかなり工夫されていて、予想以上に自動化は進んでいた」と話すが、おかずを詰める作業は自動化が難しい。
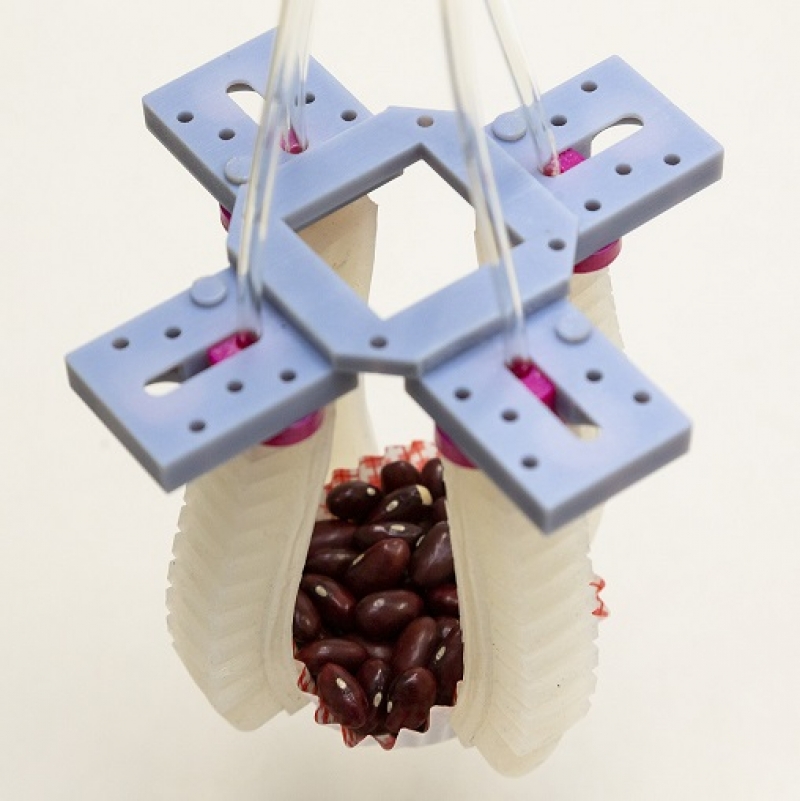
おかずは紙やプラスチックの小さなカップに入っていることが多いが、輪郭の形状にバラつきがあるため、既存のロボットハンドではつかめないからだ。
既存のハンドで対応しにくい理由は他にもある。例えば、製造ラインが混流生産であること。おかずの種類は弁当の何倍も多い。おかずに合わせて素早くハンドを脱着でき、傷んだら惜しまず捨てられるほど開発や製造のコストが低くなければならない。
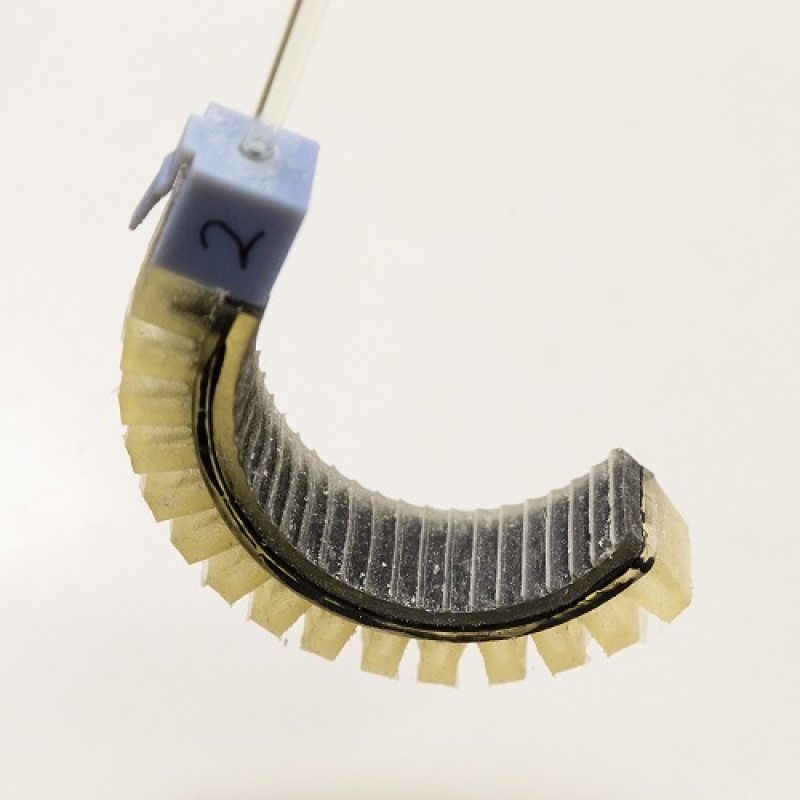
また、食品に触れても問題がない安全な素材であることも必須条件だ。平井教授が実用化に向け研究するソフトハンドは、これらの条件をクリアする。指の型は3Dプリンターで製作する。エアーで指を曲げるので、食の安全性も高い。2020年の実用化を目指して、これから模擬ラインでテストを始める。――後編へ続く(ロボットダイジェスト編集部)平井慎一(ひらい・しんいち)立命館大学理工学部ロボティクス学科教授1987年京都大学大学院工学研究科数理工学専攻博士課程進学。89年7~12月米国マサチューセッツ工科大学客員研究員。90年京都大学大学院工学研究科数理工学専攻博士課程単位取得退学。同年大阪大学工学部電子制御機械工学科助手。91年工学博士。95年助教授。96年立命館大学理工学部ロボティクス学科助教授。2002年教授。03~07年立命館大学理工学部21世紀COE研究専念教員。宮崎県出身の55歳。※この記事は「月刊生産財マーケティング」2019年2月号に掲載した連載「今に花咲き実を結ぶ」を再編集したものです


この記事を読んだ方へのオススメ記事








産業用ロボットに関する基礎知識 BASIC KNOWLEDGE
関連キーワード

ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年7月号の特集は「変種変量時代の勝てる現場~柔軟性と生産性を両立する鍵~」です。電子版も販売しております。詳しくは当欄の下部から。
