[気鋭のロボット研究者vol.2]力の制御と位置制御を両立/慶応義塾大学野崎貴裕専任講師【前編】

2017年9月、新エネルギー・産業技術総合開発機構(NEDO)と慶応義塾大学は連名で、身体感覚を伝送する双腕方ロボット「ジェネラル・パーパス・アーム(GPアーム)」の開発に成功したと発表した。そのプロジェクトを中心になって進めたのが慶応義塾大学の野崎貴裕専任講師(当時助教)だ。
ロボットが自分の分身に
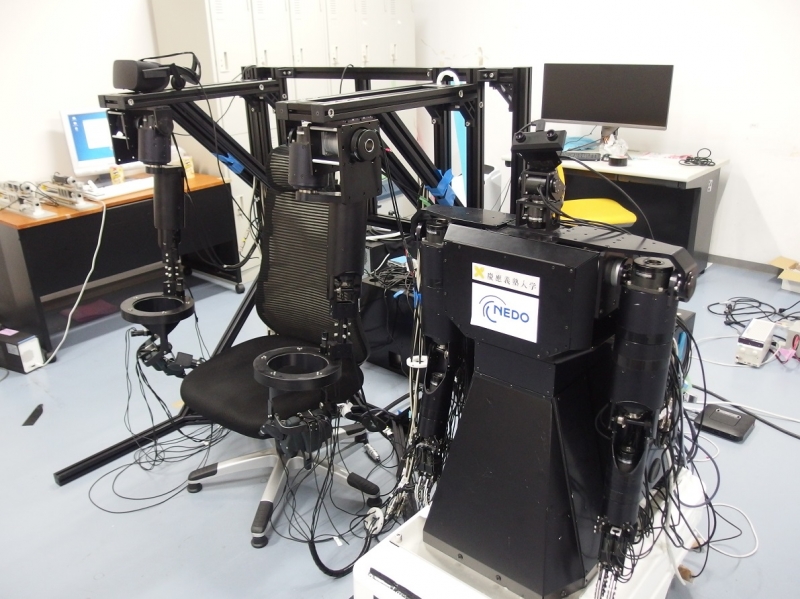
GPアームは、操作者の動作をそのまま遠隔地で再現するロボットだ。
操作者は両手に専用グローブを装着し、頭にはヘッドマウントディスプレーを着ける。専用グローブの動きはロボットの両手に伝えられ、ヘッドマウントディスプレーにはロボット頭部のカメラの映像が映る。
視界も動作も操作者とロボットが連動した状態だ。「映画『アバター』に出てくるアバター(分身)のような状態」と野崎専任講師は言う。
ロボットが物に触れた感覚(力触覚)を操作者に正確にフィードバックでき、自分の手のようにロボットを操作して繊細な作業ができる。紙コップを持って水を注ぐことや、ポテトチップスを割らずに持つことも簡単だ。
圧力も位置も再現
最大の特長は、位置制御と力の制御を両立したこと。
通常は、物を持つ際の圧力を忠実に再現すると位置にずれが生じ、位置を正確に制御すると圧力の調整はできない。
これを可能にしたのが「加速度規範双方向制御方式」という理論だ。モーターの回転とトルクを求める数式を加速度の次元に変換して統合的に制御するもので、野崎専任講師の恩師である慶応義塾大学の大西公平元教授(現ハプティクス研究センター副センター長)が2002年に考案した。
この理論を発展させ、ロボットの形にしたのがGPアームだ。
「人の代替をするには、従来の位置制御だけでは不十分。力の制御もできれば、ロボットでできる作業が一気に広がる」と話す。
——後編に続く
(ロボットダイジェスト編集部)
野崎貴裕(のざき・たかひろ)
慶応義塾大学 専任講師
2010年3月慶應義塾大学理工学部卒。12年3月同大学院理工学研究科修士課程修了。14年3月同博士課程修了。14年3月横浜国立大学大学院研究教員。15年4月慶応義塾大学助教、18年4月より現職。「CEATEC 2016審査委員特別賞」、「S-Booster 2017 審査員特別賞」など受賞。東京都出身の31歳。
※この記事は「月刊生産財マーケティング」2018年8月号に掲載した連載「今に花咲き実を結ぶ」を再編集したものです。


この記事を読んだ方へのオススメ記事








産業用ロボットに関する基礎知識 BASIC KNOWLEDGE



ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年6月号の特集は「RTJで“現場”が変わる!~最新ソリューションは愛知に~」です。電子版も販売しております。詳しくは当欄の下部から。
