[注目製品PickUp!Vol.4]こんな構造見たことない、狭い空間を縦に使う【後編】/セイコーエプソン 「Nシリーズ」
セイコーエプソンの垂直多関節ロボット「Nシリーズ」は、折りたためる独自のアーム構造を採用したユニークな製品だ。アームの根元から次の関節(第二関節)までがとても長く、第二関節から内側に折りたたむようにアームを使う。前編ではこの構造の特徴やメリットを取り上げたが、後編ではその使い方に焦点を当てる。「狭い空間でさまざまな作業ができるのは、この製品の大きな魅力」とロボティクスソリューションズ事業部長の吉田佳史執行役員は言う。
600×600㎜に4つの機能を詰め込む
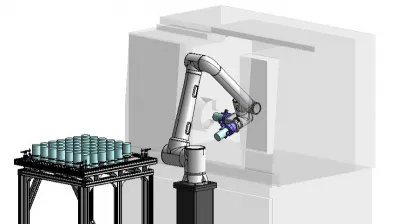
セイコーエプソンの垂直多関節ロボット「Nシリーズ」。2.5kg可搬で天つりタイプの「N2」は、主に電子機器などの小型部品の搬送や組み立て、ねじ締めなどの用途を想定する。また、薬品の調合など医療分野にも提案する。
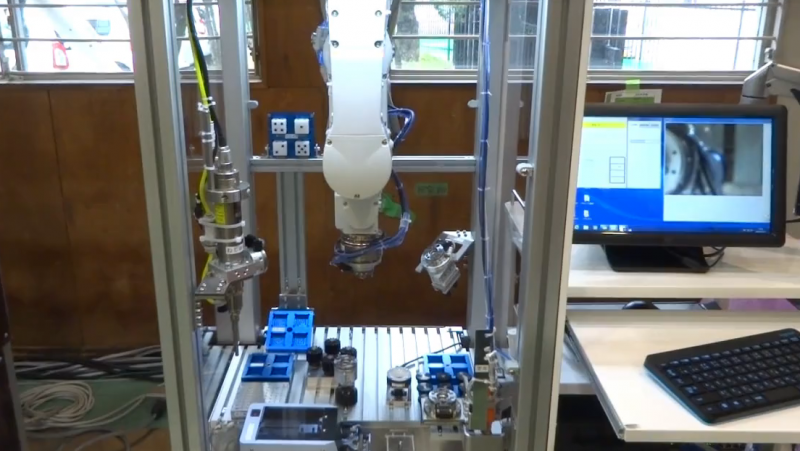
デモでは、設置面積600×600mmのボックスの中にN2を天つりで設置。歯車をはめる作業や、微小なねじ締め、作業時に部品を固定する器具(ジグ)の交換など、4つの役割を担わせた。
狭い空間でこれほど多くの役割を担えるのは、ボックスの底面だけでなく、上の空間も作業ステーションやストッカーとして有効に使っているため。アームを伸ばしたり折りたたんだりしながら、ボックス内の空間をフルに使って作業する。
アームの根元付近でも作業ができるNシリーズならではのシステムだ。
センサーで機能を拡張
これらの用途をこなす上で重要な役割を果たすのが、力覚センサーやビジョンセンサーなどのオプションだ。
ねじ締めでは力覚センサーが活躍する。雄ねじと雌ねじがうまくかみ合っていないと、回すときの負荷が大きくなる。この負荷の違いを感じ取ることで、ねじがうまく締まっているか確認できる。この他、精密なはめ合い作業や研磨など、これまで人の手の感覚に頼っていた作業を自動化できる。
力覚センサーには、水晶圧電方式とひずみゲージ方式がある。ロボットではひずみゲージ方式を使う企業も多いが、同社は水晶圧電方式を採用する。

「当社は時計や電子機器に使う水晶デバイスのメーカーでもあり、水晶圧電方式のセンサーは得意分野。ひずみゲージ式よりも圧力が加わった際の変形が少ないため、ロボットに組み込めば精密な作業ができる」とロボティクスソリューションズ事業部長の吉田佳史執行役員は言う。
スカラロボットでは斜め穴へのねじ締めは難しいが、N2なら穴が斜めでも真横でも対応できる。
また、ビジョンセンサーも活用した。歯車がセットしてあるところにさらに別の歯車を組み込むには、力覚センサーによる触覚に加え、両方の歯の位置を認識して、角度を合わせる必要がある。ビジョンセンサーを使えばその角度合わせができる。
同じ企業の記事
>>小型の協働ロボットを開発、ラボの自動化に対応/セイコーエプソン
>>WWFとパートナーシップ締結/セイコーエプソン
>>ロボットから製造ソリューションへ、エプソンの新方針は「ものづくりの革新」/セイコーエプソン
>>コントローラー内蔵型に防じん・防水仕様など追加/セイコーエプソン
>>[特集 国際ロボット展vol.5]ロボティクス技術とセンシング技術を融合/セイコーエプソン
>>東京にショールームを開設、産ロボの展示も/セイコーエプソン
>>コントローラー内蔵の6軸ロボットを発売/セイコーエプソン
>>[注目製品PickUp!Vol.4]こんな構造見たことない、狭い空間を縦に使う【前編】/セイコーエプソン 「Nシリーズ」
>>スカラロボット「LSシリーズ」に可搬重量10kgタイプを追加/セイコーエプソン


この記事を読んだ方へのオススメ記事






産業用ロボットに関する基礎知識 BASIC KNOWLEDGE





ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年7月号の特集は「変種変量時代の勝てる現場~柔軟性と生産性を両立する鍵~」です。電子版も販売しております。詳しくは当欄の下部から。
