[気鋭のロボット研究者vol.28]ワイヤ駆動で高出力化や高速化【前編】/中京大学 木野仁教授
中京大学の木野仁教授の研究テーマは受動歩行ロボットや筋骨格型ロボット、レスキューロボット、免震システムなど多岐にわたる。前編では、全般的な研究の「源流」となるパラレルワイヤ駆動ロボットについて紹介する。パラレルリンクロボットで使われるアームをワイヤに置き換えることで大幅な軽量化を実現でき、さらなる高出力化や高速化が図れるのが特徴だ。
アームをワイヤに
製造現場で使われるパラレルリンクロボットには、関節が並列につながった「パラレルリンク機構」が採用されている。複数のモーターの出力が手首先端の一点に集中するため高出力化が可能な上に剛性も高く、高速で高精度な動作ができるのが特徴だ。
木野教授は、このパラレルリンク機構に使われるアームを軽量で柔軟なワイヤに置き換えたパラレルワイヤ駆動ロボットの研究に努める。手首先端を支える複数のワイヤと、各ワイヤを巻き取ったり繰り出したりするアクチュエーターユニットでロボットが構成されており、各ワイヤが連携して手首先端の動きを制御する仕組みだ。
「従来のパラレルリンク機構よりも大幅に軽量化できるため、さらなる高出力化や高速化が図れる。軽量な分、安全性も向上する」と語る。
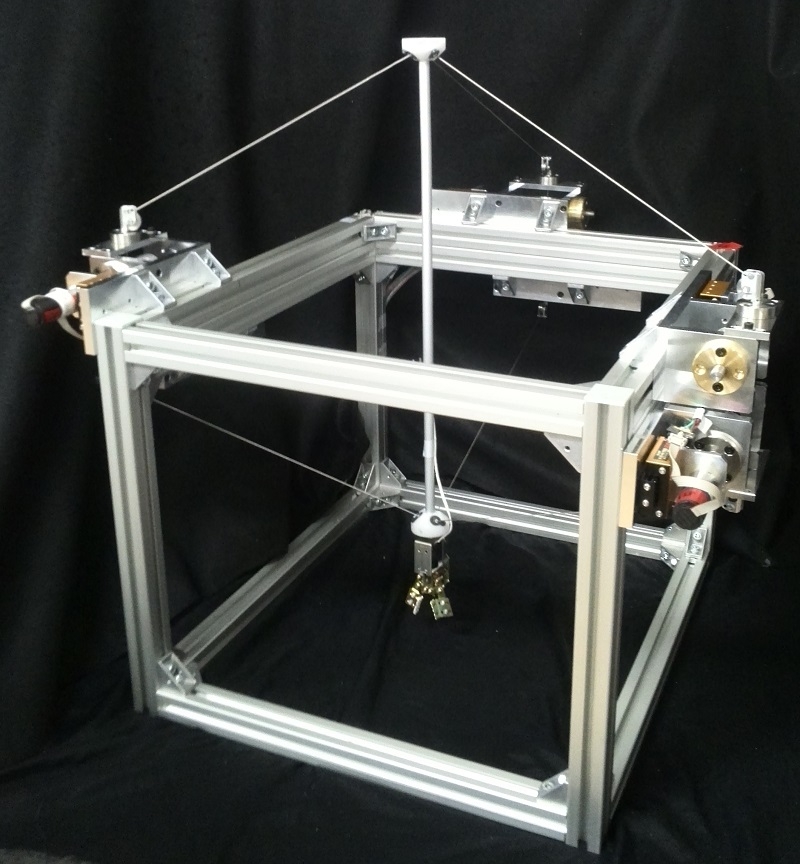
パラレルワイヤ駆動ロボットは直線的な動きを得意とするが、ねじりなどの回転運動は苦手だ。木野教授と共同研究先のケーブルメーカーはこの課題に対し、二重構造のワイヤを利用して回転運動を実現するアプローチを模索している。
木野教授は学生時代からパラレルワイヤ駆動ロボットの研究を続ける。
この研究から派生する形で、受動歩行ロボットや筋骨格型ロボット、レスキューロボット、免震システムなどにも対象領域が広がったという。
――後編に続く
(ロボットダイジェスト編集部 桑崎厚史)
木野仁(きの・ひとし)
2000年7月立命館大学大学院理工学研究科で博士号(工学)を取得。01年4月福岡工業大学工学部知能機械工学科講師、03年4月助教授、07年4月准教授、11年4月教授。20年4月中京大学工学部機械システム工学科准教授、22年4月から現職。「工学博士が教える高校数学の『使い方』教室」(ダイヤモンド社)など、多数の書籍を出版する。技術士(機械部門)の資格も保有しており、技術コンサルティングサービスを有償で手掛ける。静岡県出身の52歳。


この記事を読んだ方へのオススメ記事









産業用ロボットに関する基礎知識 BASIC KNOWLEDGE
関連キーワード



ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年6月号の特集は「RTJで“現場”が変わる!~最新ソリューションは愛知に~」です。電子版も販売しております。詳しくは当欄の下部から。
