協働ロボ用に吸着ハンドも使いやすさを追求/シュマルツ
難易度の高い「ばら積みピッキング」も簡単に
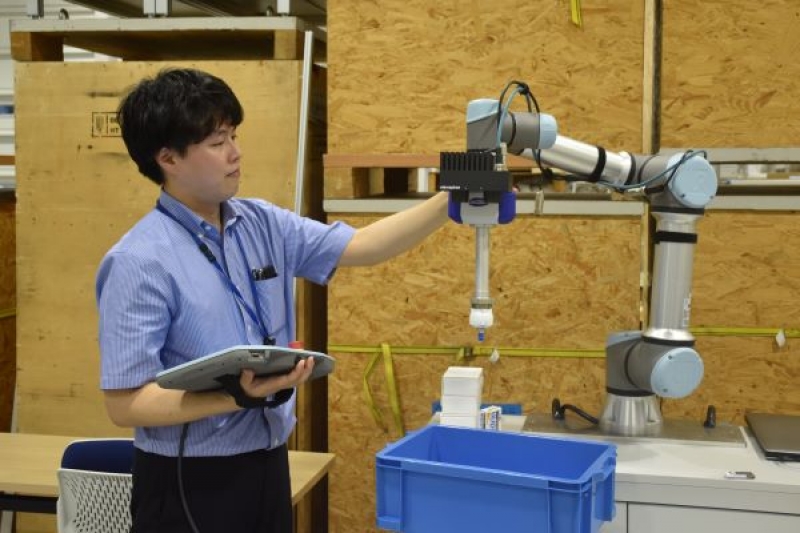
また今年9月には、3次元(D)ビジョンシステム&コボットポンプセット「3D-R」を国内販売する。ケースに乱雑に置かれた対象物を1つずつ持ち上げる「ばら積みピッキング」を、簡単に実現するために複数製品をまとめたパッケージだ。
使用するロボットを協働ロボットの世界的大手、デンマークのユニバーサルロボット(UR)製の協働ロボットに限定。その上で電動式の真空発生器「コボットポンプ」が付いたハンドや、搬送物を検出する3Dカメラと専用の照明器具、その画像処理をする専用のソフトウエアを一体にした。
それらは事前に統合された状態で顧客の手元に届く。そのため、顧客はUR製ロボットにハンドやカメラを接続し、カメラの初期設定をして、ロボットコントローラーに専用ソフトを読み込むだけで使用環境が整う。
用途限定で、面倒な事前設定を不要に
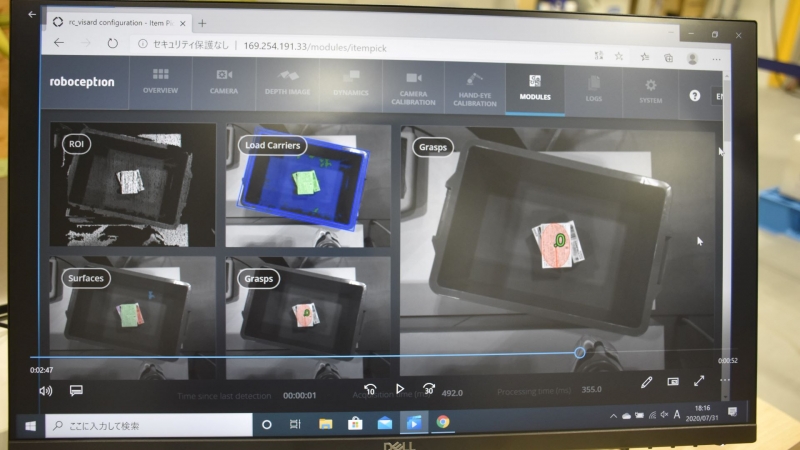
ばら積みピッキングでは、人工知能(AI)による認識技術を利用することが多い。そのため、顧客がロボットやカメラとは別に、AIを搭載して画像処理もできるコンピューターを用意するケースが大半。だが、同パッケージでは認識用コンピューターユニットを3次元カメラに内蔵する。
カメラと画像処理ソフトの組み合わせで、対象物の設計データを事前に登録しなくても、吸着する位置を自動検出する。その後、吸着までの動作軌道を算出してロボットコントローラーに出力する。
ロボットハンドの大きさなどの情報は動作システムに事前に織り込み済み。ハンドと、対象物を入れたケースなどの衝突を回避する設定も簡単。顧客の手間は大幅に減る。
ゲッテゲンス社長は「ロボットはURで、ハンドもパッケージに内包されたものを使用するなど環境条件を限定すれば、カメラとハンド、ソフトの連動で最小限のセットアップにより簡単に使用できる。ばら積みピッキング実現のハードルとされてきた、カメラとロボットハンドのシステムの統合作業は事前に設定済み。対象物の外形などの情報の取り込みも不要。カメラやロボットハンドが決して万能というわけではないが、ばら積みピッキングの中でも顧客のニーズの高い、搬送用のケースから物を取り出す作業などは簡単に実現できる」と強調する。

日本法人では9月から、オーダーメード式軽量ハンド「SLG」と3Dビジョンシステム&コボットポンプセット「3D-R」を、通常価格から30%値引きするキャンペーンを実施する。
また、テーマを限定し、製品の具体的な活用法を提案するウェブセミナー(ウェビナー)を平日はほぼ毎日開催する。ゲッテゲンス社長は「今後も顧客のニーズが高い用途に限定したパッケージ製品などを拡充し、顧客の課題解決に貢献したい」と意気込む。
(ロボットダイジェスト編集部 西塚将喜)
同じ企業の記事
>>真空ハンドをオンラインで手軽に設計/シュマルツ
>>搬送物に合わせたロボットハンドを作成できる/シュマルツ
>>大型グリッパーの導入前テストが可能に/シュマルツ
>>薄いシートを変形させずに搬送できる真空グリッパー発売/シュマルツ
>>名刺サイズの真空発生器を発売/シュマルツ
>>伸び縮みを固定できるプランジャーを開発/シュマルツ
>>複雑な表面形状にも対応! 基板向け真空ハンドを発表/シュマルツ
>>薄物搬送に最適、ハニカム模様の真空パッド/シュマルツ
>>バーチャル展示会「シュマルツエキスポ」を開催/シュマルツ
>>協働ロボットでも使える真空グリッパーを発売/シュマルツ
>>高吸い込み量の協働ロボ用エジェクターを発売/シュマルツ
>>2種類の機能拡張ハンドルを発売/シュマルツ
>>ホース抵抗による動作不良を防止/シュマルツ
>>静電気放電対策のトレンドを紹介/シュマルツ
>>移動式の真空バランサーを発売/シュマルツ
>>協働ロボットの真空グリッパーと機械式グリッパーを付け替え/シュマルツ
>>ミシン目入りの箱にも対応、横からも吸着する真空グリッパー/シュマルツ
>>協働向けツール・チェンジ・システムに高吸い込み量の真空発生器を追加/シュマルツ
>>充てん率の低い袋も安定搬送、新型真空パッド発売/シュマルツ
>>保持力強化、2枚取り防止の新型マグネットグリッパー発表/シュマルツ
>>ワーク間に隙間があってもつかめる軽量真空グリッパーを発表/シュマルツ
>>大型の袋吸着グリッパーをリニューアル/シュマルツ
>>日本法人の新社長に小野雅史氏が就任/シュマルツ
>>ワークに合わせた吸着面を実現! 軽量真空グリッパーに新タイプ登場/シュマルツ
>>クリーンルームなどに適した真空バランサーを発売/シュマルツ
>>真空バランサーをリニューアル/シュマルツ


この記事を読んだ方へのオススメ記事










産業用ロボットに関する基礎知識 BASIC KNOWLEDGE

ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年2月号の特集は「技能補うデジタル技術~熟練者不足を解決するには~」です。電子版も販売しております。詳しくは当欄の下部から。
