透明・光沢物体をカメラ1台で正確に把持する技術を開発/東京理科大学

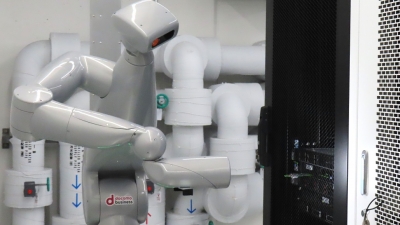
東京理科大学は3月30日、透明な容器や光沢のある包装材でも高速かつ正確に認識し、ロボットアームで把持できるようにする技術を開発したと発表した。
光を透過や反射する物体は深度センサーで距離を把握しにくい。そこで、アーム先端に取り付けた1台のカメラで複数の視点から撮影し、そのシルエットで3次元形状を推定する手法と、画像中の各画素を物体や背景などに分類する画像認識手法を組み合わせた。
多視点撮影ではカメラを動かす時間の短縮が課題だったが、撮影位置と移動経路を最適化する技術も併せて開発した。
研究を主導した創域理工学部機械航空宇宙工学科の荒井翔悟准教授は、「これまで人手に依存していた工程のロボット化を推進し、生産性向上に貢献することが期待される。さらに、事前調整を削減した設計により、既存設備への導入や多品種対応が容易になる。将来的には、段取り替えや対象追加が多い現場でも、運用条件に合わせて最適な動作を生成しやすいロボットシステムの実現を目指す」とのコメントを発表した。
〇担当記者からのおすすめ①:[iREX2025リポートvol.9]周辺機器の使用イメージや使い心地を分かりやすく提案
〇担当記者からのおすすめ②:[注目製品PickUp! vol.85]ワークと近距離の撮像で精密作業を自動化/IDS「Ensenso Bシリーズ」
〇担当記者からのおすすめ③:[注目製品PickUp! vol.75]3Dビジョンシステムの撮影速度を3倍に/Zivid「Zivid2+R」

この記事を読んだ方へのオススメ記事








産業用ロボットに関する基礎知識 BASIC KNOWLEDGE






ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年6月号の特集は「RTJで“現場”が変わる!~最新ソリューションは愛知に~」です。電子版も販売しております。詳しくは当欄の下部から。
