[気鋭のロボット研究者vol.23]未知の物体をつかむ/南山大学 中島明教授
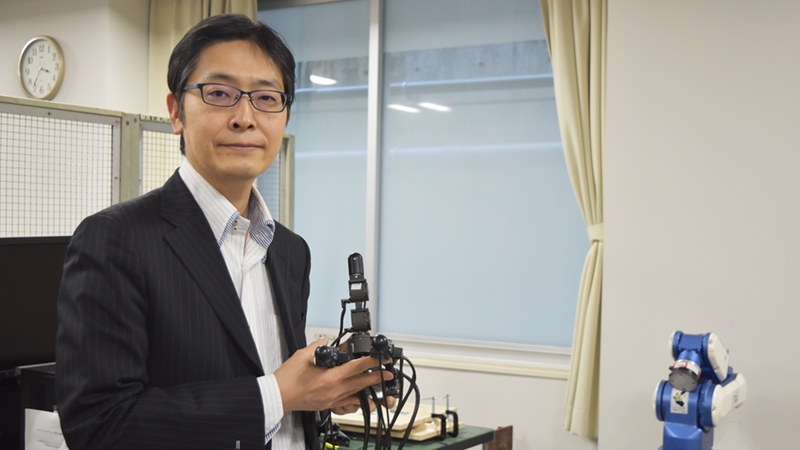
多指ハンドロボットと卓球ロボットの2つを主な研究テーマに掲げる南山大学の中島明教授。前編では、大学院の頃から研究に取り組む多指ハンドについて紹介する。ロボットに器用さや巧みさを与えるため、摩擦係数や形状、軟らかさなどが事前に分からない「未知の物体」も安定してつかめる多指ハンドの開発に挑む。
まずは製造現場に

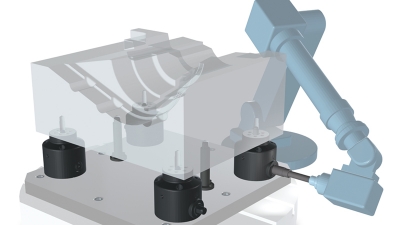
中島教授は人間のような器用さや巧みさをロボットで再現するため、さまざまな物体をつかめる多指ハンドの研究に取り組む。
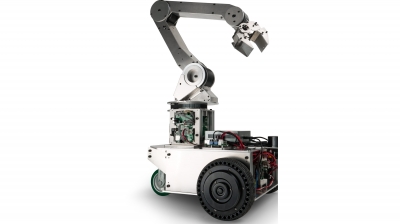
電磁モーター駆動の関節を3つ持つ3本指ハンドの実験機を使い、まずは製造現場への実用化を目指す。
多指ハンドで物体を安定的につかむには、ロボットがどこから物体にアプローチし、どこをどう持つかが大きな課題になる。中島教授は過去に、自動車部品を把持するための多指ハンドをある企業と共同研究した経験があり「ロボットの姿勢と物体の把持点を求めるのに一番苦労した。静力学的な安定さや物体の滑りやすさなどのさまざまな評価基準を設け、最適な条件を探った」と振り返る。
生産ラインで作られる自動車部品であれば素材の特性や形状が事前に分かるが、多指ハンドを実用化するには摩擦係数や形状、軟らかさなどが全く分からない物体も把持できなければならない。そのため、こうした未知の物体をつかむ場合は、ビジョンセンサーを使って形状を認識したり、指先に内蔵した小型の力覚センサーで接触した時の力加減を測定したりし、その物体の情報を取得する必要もあるという。
「研究の進ちょくは100点中30点ほど」と中島教授の自己評価は厳しい。
「物体を安定的につかむだけではなく、途中で落としそうになった時にリカバーする動作もできて、初めて人間のような器用さを再現できる。そこまでの道のりは遠く、やるべきことはまだまだ多い」と語る。
――後編に続く
(ロボットダイジェスト編集部 桑崎厚史)
中島 明(なかしま・あきら)
2005年3月名古屋大学大学院工学研究科電子機械工学専攻博士課程修了、同工学研究科機械理工学専攻助手。07年4月同助教。15年4月南山大学理工学部機械電子制御工学科准教授。20年4月同教授、21年10月から現職。石川県出身。1977年生まれの44歳。
※この記事の再編集版は、設備財や工場自動化(ファクトリーオートメーション=FA)の専門誌「月刊生産財マーケティング」2022年2月号にも掲載されています。


この記事を読んだ方へのオススメ記事







産業用ロボットに関する基礎知識 BASIC KNOWLEDGE

ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年7月号の特集は「変種変量時代の勝てる現場~柔軟性と生産性を両立する鍵~」です。電子版も販売しております。詳しくは当欄の下部から。
