[気鋭のロボット研究者vol.9]ロボは動きを記録する媒体【前編】/神戸大学大学院横小路泰義教授
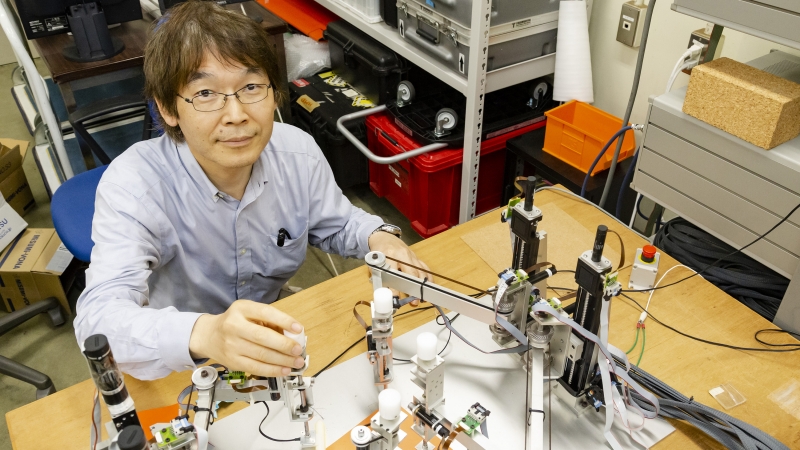
産業用ロボットもサービスロボットも、人の仕事をロボットに任せようとの考えが原点にある。つまり、ロボットの進歩は人の機能に近付くことに他ならない。横小路泰義教授は人の外見や形状ではなく機能に着目し、ロボットで実現しようと研究する。多岐にわたる研究テーマのうち、前編では遠隔操作技術を紹介する。
折り紙で遠隔操作を研究
横小路教授は、ロボットでの人の機能の再現を研究の目標としており、テーマは幅広い。中でも「遠隔操作はロボット研究者にとって40年来のテーマ」と話す。
災害救助や手術用ロボットをイメージする人が多いかもしれないが、産業用ロボットにとっても身近なテーマだ。
「遠隔操作を離れた場所のロボットに動きを伝える技術と捉えれば、産業用ロボットのティーチングとほぼ同じ」と語る。
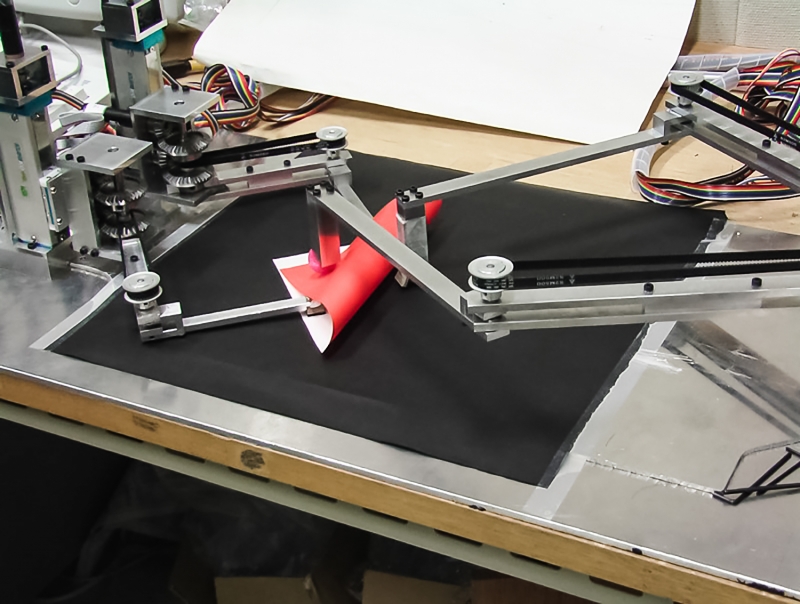
横小路教授は折り紙を研究や実験の切り口にしている。
ビジョンセンサーを使わず、10g未満の力に反応する高感度な力覚センサーを手作りし、きれいに折る手法を探求する。
ロボットで鶴を折る
1回のティーチングでは、その紙の折り方を正確無比に再現しても、きれいには折れない。きれいに折るティーチングを20回ほど繰り返し、その平均値を取ると改善した。
センサーが10ミリ秒ごとに検出する紙の反発力を、リアルタイムで反映し補正すると、さらに改善した。今はカエルなど比較的簡単な折り紙をしているが、「鶴を折るロボットを目指す」と言う。
横小路教授は遠隔操作の研究が進めば、「産業用ロボットを、人の動きを精密に記録し保存する媒体として活用できる。職人技を保存できれば技術を継承しやすいし、自動化のヒントにもなる」と語る。そこに至るにはハード、ソフト両面で進歩が必要だが、「だからこそ研究を継続すべき」と力を込める。
――後編へつづく
(ロボットダイジェスト編集部 松川裕希)
横小路泰義(よここうじ・やすよし)神戸大学大学院工学研究科機械工学専攻教授1988年京都大学大学院博士課程中退、京都大学工学部オートメーション研究施設助手。92年機械工学科助教授。2007年機械理工学専攻准教授。09年神戸大学大学院工学研究科機械工学専攻教授。18年日本機械学会ロボティクス・メカトロニクス部門功績賞受賞。14~18年レスキューロボットコンテスト実行委員長。ワールドロボットサミット2020ものづくり競技委員会委員長。1961年生まれ58歳。大阪府出身。


この記事を読んだ方へのオススメ記事










産業用ロボットに関する基礎知識 BASIC KNOWLEDGE

ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年8月号の特集は「飛躍する中堅・中小~100億に向け攻める経営~」です。電子版も販売しております。詳しくは当欄の下部から。
