【特集】[集結! 自動化の最新提案vol.9]次世代技術、続々【後編】
異なるロボを共通システムで
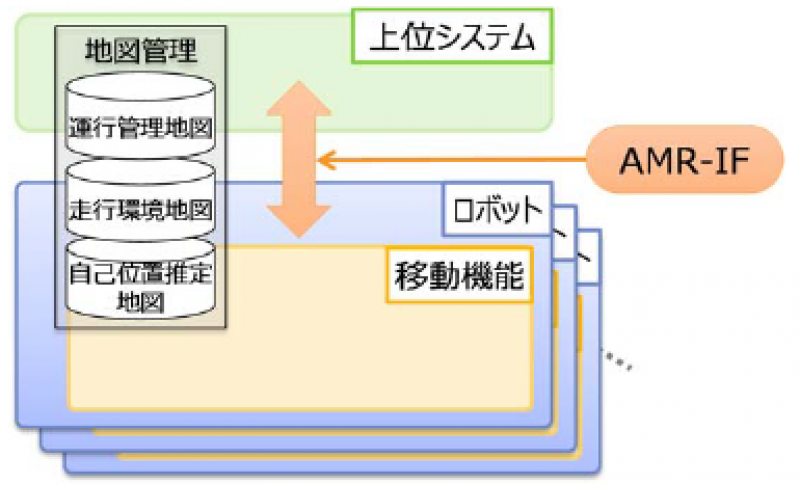
NEDOと東芝は今年3月、自律型移動ロボットと運行管理システムを接続するためのインターフェース「AMR-IF」(Autonomous Mobile Robot Interface)の仕様を決定した。AMR-IFに準拠した操作端末ソフトのサンプルを、誰もが自由に使用、改良できるオープンソースソフトとして公開した。
このソフトの活用で、上位システムを構築するシステムインテグレーターや移動ロボットのメーカーが、ロボットを使ったシステムを開発しやすくなり、ロボットが導入されていない分野で、ロボットの普及やコストの低減が期待できる。
AMR-IFは、移動ロボットの運行管理に必要な地図情報や走行経路指示、ロボットの現在位置情報などのプロトコル(規約)を定めたもの。AMR-IFに準拠し、複数台の移動ロボットの効率的な経路計画を作り、複数ロボットの同時進入による行き詰まりである「デッドロック」の回避などの運行管理システムを構築できる。

昨年12月に開催された「2019国際ロボット展」では、THKやパナソニックらと、メーカーも種類も違う3台の移動ロボットが連携するデモンストレーションを披露し、一つの上位システムで異なるメーカーのロボットを管理できることを証明した。
製造・物流現場や公共施設内での、搬送や警備、清掃などさまざまな業務で、自律型移動ロボットが普及しつつある。これらの移動ロボットは各メーカーがそれぞれ、上位システムの運行管理システムを開発し、独自のインターフェースで移動ロボットと接続している。そのため、メーカーの異なる移動ロボットを新たに導入する時には、運行管理システムを開発し直す必要があった。また複数メーカーや種類の違う移動ロボットを同じ運行管理システムに接続することもできず、ロボットを導入する上で大きな阻害要因となっていた。
――終わり
(ロボットダイジェスト編集部、芳賀 崇)


この記事を読んだ方へのオススメ記事









産業用ロボットに関する基礎知識 BASIC KNOWLEDGE


ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年5月号の特集は「AIブームが広げる市場~成長領域のニーズに応えよ~」です。電子版も販売しております。詳しくは当欄の下部から。
