簡単に扱えるロボ提案、製造業向け展示会で相次ぐ
人工筋肉ハンドを製造業向けにも
ブリヂストンの社内ベンチャーのソフトロボティクスベンチャーズは、自動車部品をイメージした4つのサンプルワークを1つのロボットハンドでピッキングする作業を披露した。
同社は、人工筋肉を活用して柔らかい動きを実現するソフトロボットハンドを開発する。これまで、同じハンドで複数種類のワークをつかめる特徴などを生かして、物流現場に向けて提案に注力してきた。今回展では、生産現場での使用をイメージしたピッキングを実演した。
ソフトロボティクス推進課の手塚晶子さんは「さまざまな形状の部品を、1つのハンドで把持できるため、部品ごとに付け替える必要がない。つぶさずに把持するのが難しい食品向けなど、ソフトロボットハンドを活用できる分野は多い」と語る。
カメラなしのピッキング作業を
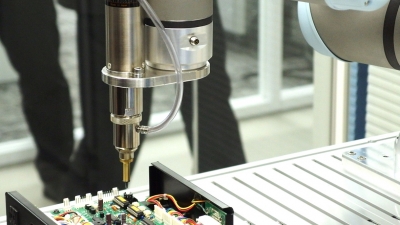
大阪大学発のベンチャー企業のThinker(シンカー、大阪市中央区、藤本弘道社長)は、独自の近接覚センサーをばら積みピッキングに生かした。
赤外線とAIを組み合わせた技術で、対象物との距離や傾きなどを非接触で認識する。ブースでは小さなねじを自動でピッキングするデモを展示した。
近接覚センサーがロボットハンドの爪の動きを検知し、ねじを把持した時の爪の開きなどを認識する。つかみそこなった場合は爪が異なる挙動をするため、その動きを認識すると自動で再度ねじを取る動作サイクルを始める。
取締役を務める中野基輝最高技術責任者(CTO)は「カメラを使わずにピッキングの自動化を実現する。従来にない技術のため、生産現場などで稼働する既存のシステムにどう組み込むかが課題」と語る。
3種の走行方式を搭載するAGV
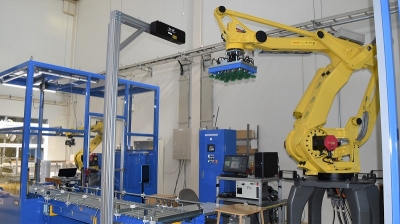
中西金属工業(大阪市北区、中西竜雄社長)は、無人搬送車(AGV)の「ROBO Rook(ロボルーク)」などを披露した。
ロボルークは磁気テープ式と2次元コード式、センサーで自己位置の推定と周囲のマッピングをする「SLAM(スラム)」方式の3つの走行方式を搭載する。周囲の状況に合わせて走行方式を選べる。
また2次元コードを利用して、マップを切り替える機能を開発中という。
輸送機器事業部の光川竜右企画部長は「例えばAGVがエレベーターで別の階に移動した際に、2次元コードを読み取ってその階のマップに切り替える。一度に読み込めるマップの広さには限界があるが、マップを分割して切り替えることで、従来以上に広い倉庫などでも活用できる」と話す。


この記事を読んだ方へのオススメ記事






産業用ロボットに関する基礎知識 BASIC KNOWLEDGE



ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年6月号の特集は「RTJで“現場”が変わる!~最新ソリューションは愛知に~」です。電子版も販売しております。詳しくは当欄の下部から。
