【特集】[集結! 自動化の最新提案vol.9]次世代技術、続々【後編】
自律的な作業を実現するAI技術
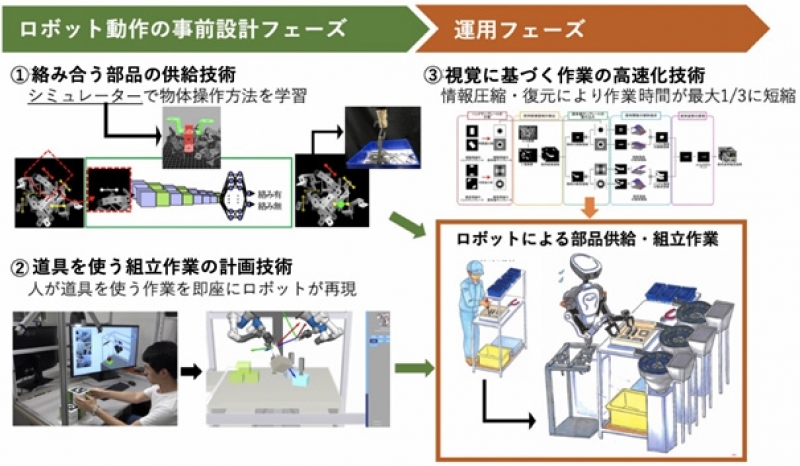
NEDOと産業技術総合研究所(産総研)、大阪大学、中部大学は昨年8月、製造現場でのロボットの自律的な部品供給、組み立て作業を実現する人工知能(AI)技術を開発した。
物の形状データや人による作業実演データを基に、ロボットでの部品供給と組み立て作業の事前行動計画、視覚情報に基づく作業中の高速な行動計画を作れる。これにより、従来は難しかった多品種少量生産で複雑な形状の部品を必要とする組み立て工程へのロボットの導入や、製造業の生産性向上が期待できる。本技術で作成した行動計画策定ソフトウエアを特設ウェブサイト(https://nedo-robot-ai.jimdofree.com/)上で公開した。
ロボットが試行錯誤を繰り返すことで難しい作業を学習することは、ロボットにとって有効な方法だ。しかし、ロボット実機による大量の作業実行が必要なため、生産現場での実用は困難だった。この開発では、作業の難しさに応じて、人が事前に注目した情報を、人が設計した手順に従って理解、認識する従来型の手法と、シミュレーションによる深層学習の手法を使い分けて、実機を使わない物体操作の学習を実現した。
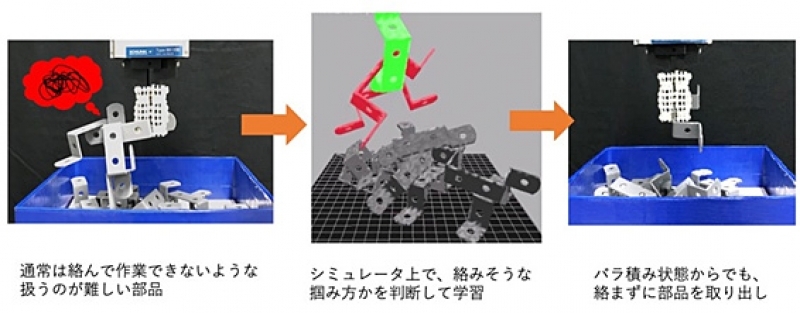
シミュレーター上でバラ積み状態の物体が絡むか、絡まないかを検証し、シミュレーター上で学習させて、絡む可能性のある部品を避けてロボットが部品を取り出すことを可能にした。
取り出しの成功率は、従来の実機による学習事例と同等の90%程度という。人がロボットから目を離さずに1~2日かけて学習させる困難な教示作業を、1部品につき5時間程度のシミュレーションを動作させるだけ(その間人手は不要)で学習させられ、事前の作業時間や人の手間を削減できる。
他にも、見まねによる即時教示・道具操作など、合わせて4つの具体的な技術を開発した。

この記事を読んだ方へのオススメ記事










産業用ロボットに関する基礎知識 BASIC KNOWLEDGE



ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年6月号の特集は「RTJで“現場”が変わる!~最新ソリューションは愛知に~」です。電子版も販売しております。詳しくは当欄の下部から。
