[注目製品PickUp!vol.21]高精度な一体型アクチュエーターユニット【前編】/ニコン「C3 eMotion」
独自の「ダブルエンコーダ構造」
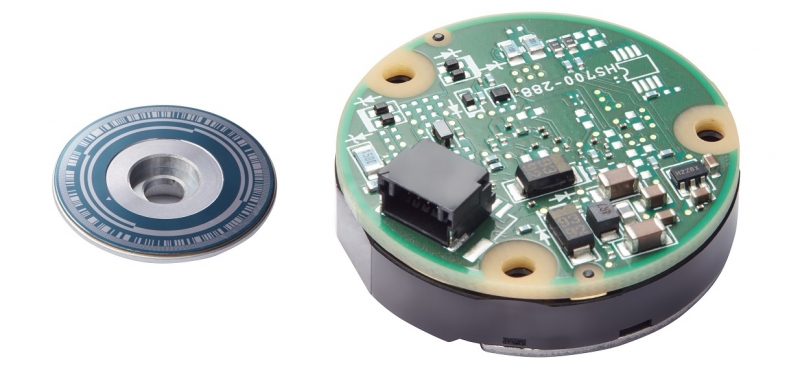
C3 eMotionの最大の特徴は、高精度なエンコーダーによる高精度な位置検出にある。それを可能にするのが「ダブルエンコーダ構造」による「フルクローズドループ」。
エンコーダーなどセンサーからの信号を基にして、指令に対して補正を常にかけるのがフィードバック制御。ロボットの関節部は、動力源であるモーターが回転し減速機やモーターシャフトを介して動作するため、モーターの回転(入力側)と動作位置(出力側)には微細な角度伝達誤差が生じてしまう。一般的に、エンコーダーはモーターに設置されるため、間接的に動作位置を把握してフィードバックする「セミクローズドループ」制御となる。
しかしニコンのダブルエンコーダー構造は、エンコーダーを減速機側とモーター側の2カ所に搭載する。対象の位置を減速機側で直接検出し、指令と結果を比較しながらモーターを制御するフルクローズドループだ。
「開発のきっかけは、減速機の角度伝達誤差への対策。どんなに高精度で高機能な減速機でも、角度伝達誤差をゼロにはできない。その誤差を計測し、ロボットの挙動を高精度化するのを目的とした」と田口課長代理は振り返る。角度伝達の誤差を嫌う顧客は、ダブルエンコーダ構造への関心が高く、2013年ごろから最初の取り組みが始まっていた。
協働という追い風

13年のiREXにダブルエンコーダー構造を採用したアクチュエーターユニットを参考出展した。理論的には、減速機部分での精密な位置検出によるフルクローズドループ化は高精度化につながるが、実際にアクチュエーターをロボットに組み込んで制御しながらの高精度化にはさまざまな課題があった。
そこでモーターの制御方法の開発にも踏み込み、ニコン社内の装置制御エンジニアの協力を取り付け、課題解決に取り組んだ。別事業部のエンジニアの強力なバックアップもありこの難題を解決、内製した制御アルゴリズムをコントローラーに実装するなどし、ダブルエンコーダーによる高精度な制御を実現した。

高精度を目的に開発を進めてきたアクチュエーターユニットだが、「13年以来、世の中の流れが変わった」(田口課長代理)。iREXの15年展、17年展と、協働ロボットが増えてきたのだ。人と協働するには、人と接触すると直ちに停止する必要がある。トルクセンサーや力覚センサーなどを取り付けるのが一般的だが、「高精度を目指してきたダブルエンコーダ構造だが、人との接触による外力も検出できるため、協働ロボットの要求にも応えるものになった」と田口課長代理は言う。図らずも時流に乗った開発として、C3eMotionがシーンの前面に躍り出る。後編では、ニコンのエンコーダー事業の歴史に触れ、いかにして一体型アクチュエーターユニットが生まれたかに迫る。――後編へ続く(ロボットダイジェスト編集部芳賀崇)


この記事を読んだ方へのオススメ記事









産業用ロボットに関する基礎知識 BASIC KNOWLEDGE

ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年7月号の特集は「変種変量時代の勝てる現場~柔軟性と生産性を両立する鍵~」です。電子版も販売しております。詳しくは当欄の下部から。
