[ロボへの道も一歩からCase.1-⑪]ロボが動く時…/サンエース編
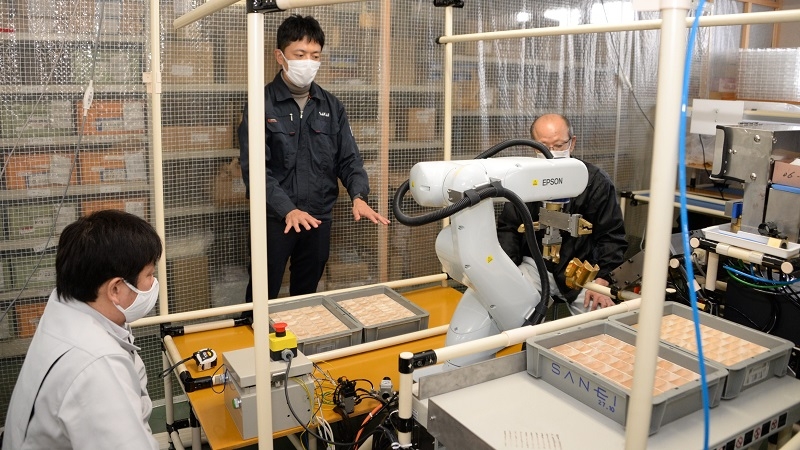
一連のロボットの動きを見せてもらうことに。ぶつからないか見ながらなので、ゆっくりとした動きだが、確実に作業の流れができている。
ロボットがストッカー(箱)に入ったエルボをつかんで取り出す。1度、エルボを検査機の脇に設置した台に置き、ハンドを変えて持ち直してから検査機へセット。終わったら、検査機から取り出す。
干渉しそうな場所も、ギリギリで回避する。
検査機の脇の台からエルボをつかむ時の、台とハンドの隙間は1mm以下だという。

「ギリギリを攻めすぎてないですか?」(記者)
「ギリギリを狙わないとエルボが取れないように、設計したんです……斉藤さんが」(糠谷さん)
「設計した時から、ここは仕方がないと思ってました」(斉藤さん)
「ロボットの速度を速くしたら、ぶつかりそうですね」(藤田社長)
「多少はぶつかってもいいように、エルボの台は少し動くように作ってます。台が壊れてもすぐに直せますけど、ロボットやハンドが壊れたら一大事ですから」(斉藤さん)

今は空運転を繰り返し、想定外のことが起きないかを見ながら、問題があったら修正する考えだ。動かしながら改善点や改良点を加えていくステップに入った。「ここまで来れば一安心。ステップを上がった感じがします」(斉藤さん)「ここまで自分たちだけで形にするのは、なかなかできないと思います」(記者)「本当にそう思います。うちの規模の会社でロボットシステムを仕上げることは……しかもSIerに頼らず」(藤田社長)「確かに斉藤さんがいてくれたからできたシステムですからね」(記者)「なので、斉藤さんのいる内に作り上げて、いろんな人にロボットを通じて技術の伝承ができればいいと考えてます」(藤田社長)――次回最終回「ロボットのある日常へ」(ロボットダイジェスト編集部渡部隆寛)本連載でご意見やご質問などがありましたら、ロボットダイジェスト編集部(news-co@news-pub.co.jp)までご連絡ください。また、「ウチもロボットを導入する計画があるから、取材受けてもいいよ」という企業も募集中です!
同じ企業の記事
>>[ロボへの道も一歩からCase.1-⑫(最終回)]ロボットのある日常へ/サンエース編
>>[ロボへの道も一歩からCase.1-⑩]まずは一通りできるように!/サンエース編
>>[ロボへの道も一歩からCase.1-⑨]作業の選択と集中/サンエース編
>>[ロボへの道も一歩からCase.1-⑧]立ちはだかる干渉の壁/サンエース編
>>[ロボへの道も一歩からCase.1-⑦]ロボ、ついに降臨!/サンエース編
>>[ロボへの道も一歩からCase.1-⑥]ハンドの爪、削ってます/サンエース編
>>[ロボへの道も一歩からCase.1-⑤]どう置くんだ、ストッカー!?/サンエース編
>>[ロボへの道も一歩からCase.1-④]ロボ決まる/サンエース編
>>[ロボへの道も一歩からCase.1-③]SIer不在で進行中/サンエース編
>>[ロボへの道も一歩からCase.1-②]ベテラン斉藤さん現わる!/サンエース編
>>[新連載・ロボへの道も一歩からCase.1-①]やっぱりコロナはキツかった/サンエース編


この記事を読んだ方へのオススメ記事











産業用ロボットに関する基礎知識 BASIC KNOWLEDGE

ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年4月号の特集は「重厚長大の時流を読む~変わる市場と生産体制~」です。電子版も販売しております。詳しくは当欄の下部から。
