[ロボへの道も一歩からCase.1-⑧]立ちはだかる干渉の壁/サンエース編
「ロボへの道も一歩から」では、産業用ロボットを初めて導入しようとする会社を記者が訪問、その課程で起きた出来事や苦労などを紹介する。何度も足を運び、ロボットの導入までを追いかける。まだ進行中の計画を取材するため、何が起こるのか誰にも分からない。第8話は、ロボットをついに受け取ったサンエースの前に、新たな壁が立ちはだかった話。
ロボ納入で計画も加速、とは行かず。
【前回までのあらすじ】
水栓金具の組み立てや検査をするサンエース(岐阜県各務原市、藤田斉社長)は、検査作業の自動化を図るため6軸垂直多関節ロボット「VT6L」を購入。昨年末に納入された。すでにハンドの作成なども進めており、ロボットの登場で計画は加速するかと思われたが……

システムインテグレーター(SIer、エスアイアー)に頼らずにロボットの導入を進めるサンエースでは、旗振り役の藤田社長と実務を担当するベテラン生産技術者の斉藤さんの二人三脚で計画を進めている。
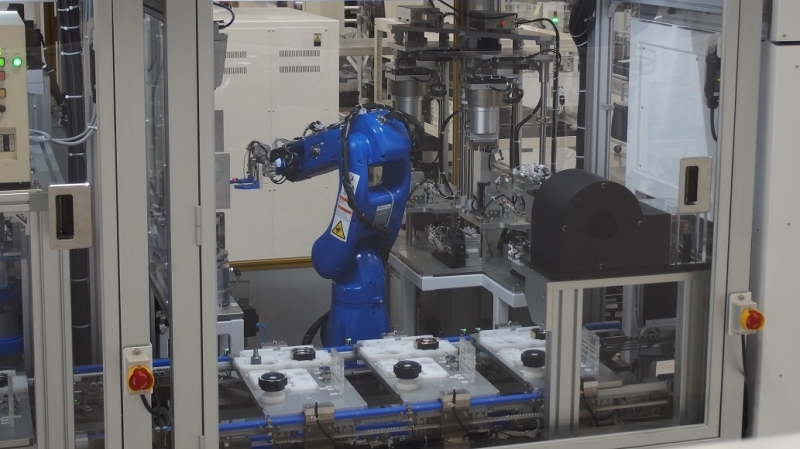
自動化をする作業は、配管に使われる鋳物部品「エルボ」の耐圧検査だ。ストッカー(箱)に整列したエルボを取り出し、検査機へセット。検査後は取り出して良品、不良品に分けてストッカーに整列させる。それを実現するため、エルボの持ち方に合わせ、2種類のハンドの爪を作成(第6話参照)、段積みするストッカーの高さを調整する昇降機も購入した。

そしてついに、念願のロボットが手に入り、自動化に必要な物はほとんどそろった。
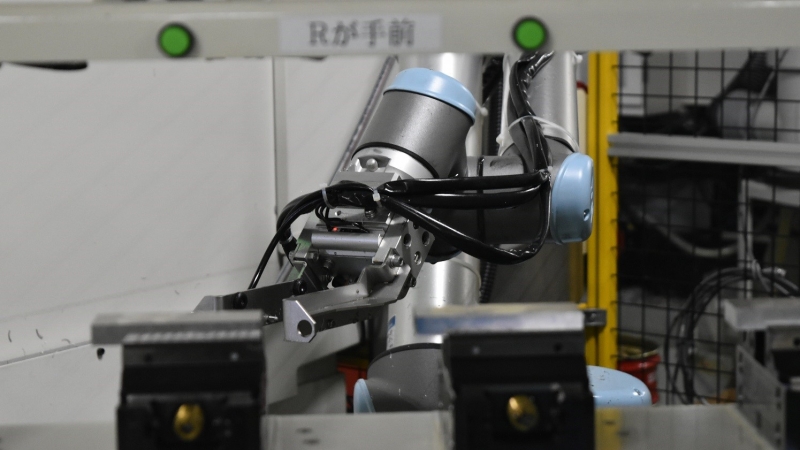
ロボットの先端にハンドをあわせ、斉藤さんは思った。
「これ、ぶつかるやん!」と。

ロボットの先端には、「ストッカーからの搬入出」「検査機へのセット」「空きストッカーの移動」の各工程向けに、3つのハンドを取り付ける。先端を旋回させることで、それぞれのハンドを使い分ける予定だ。その旋回する時に、アームの位置や姿勢によって、本体とハンドがぶつかる(干渉する)可能性が出てきた。
図面だけでは分からない場所だったという。
「干渉が出ないように設計したんですが、見落としていたようです」(斉藤さん)
斉藤さんが常に操作をするなら、危険な動作を避けて指示することもできる。しかし、現場では誰がどのような指示を出すか分からない。誰が動かしても大丈夫な設計にする必要があった。
同じ企業の記事
>>[ロボへの道も一歩からCase.1-⑫(最終回)]ロボットのある日常へ/サンエース編
>>[ロボへの道も一歩からCase.1-⑪]ロボが動く時…/サンエース編
>>[ロボへの道も一歩からCase.1-⑩]まずは一通りできるように!/サンエース編
>>[ロボへの道も一歩からCase.1-⑨]作業の選択と集中/サンエース編
>>[ロボへの道も一歩からCase.1-⑦]ロボ、ついに降臨!/サンエース編
>>[ロボへの道も一歩からCase.1-⑥]ハンドの爪、削ってます/サンエース編
>>[ロボへの道も一歩からCase.1-⑤]どう置くんだ、ストッカー!?/サンエース編
>>[ロボへの道も一歩からCase.1-④]ロボ決まる/サンエース編
>>[ロボへの道も一歩からCase.1-③]SIer不在で進行中/サンエース編
>>[ロボへの道も一歩からCase.1-②]ベテラン斉藤さん現わる!/サンエース編
>>[新連載・ロボへの道も一歩からCase.1-①]やっぱりコロナはキツかった/サンエース編


この記事を読んだ方へのオススメ記事







産業用ロボットに関する基礎知識 BASIC KNOWLEDGE
関連キーワード



ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年7月号の特集は「変種変量時代の勝てる現場~柔軟性と生産性を両立する鍵~」です。電子版も販売しております。詳しくは当欄の下部から。
