[気鋭のロボット研究者vol.4]AIで物の形から使い方を推定【後編】/中京大学橋本学教授
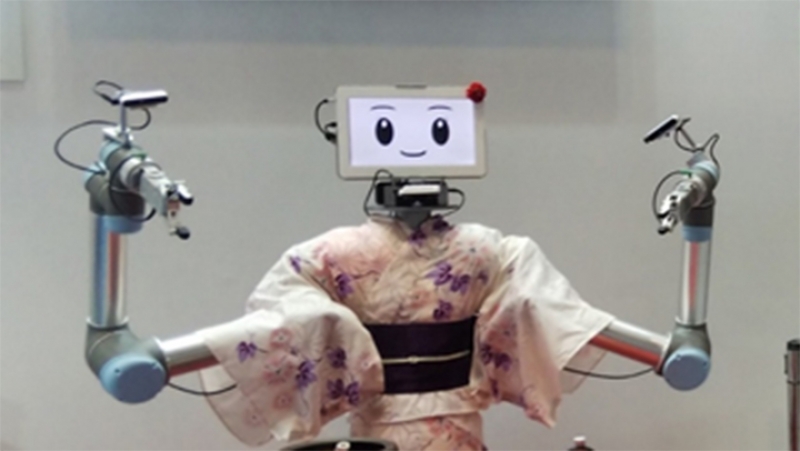
連載4回目を迎えた今回は、3つの分野のセンシング・情報処理技術を主な研究テーマに掲げる中京大学の橋本学教授に話を聞いた。2018年12月3日にアップした前編では、産業用ロボットに関わる分野の研究として、ばらばらに積まれた物体をつかみ上げる(ピッキング)時に使われるロボットの視覚システムの事例を紹介した。後編では製造現場ではなく、一般家庭にロボットを導入する時に求められる視覚システムを取り上げる。橋本教授は、物体の形状から機能、つまりその物体の使い方を人工知能(AI)で推定する機能認識のシステムを開発した。
一般家庭で求められる視覚システムも
①画像センシング②3次元(D)センシング③ヒューマンセンシング――の3つの分野を主な研究テーマに掲げる橋本学教授。
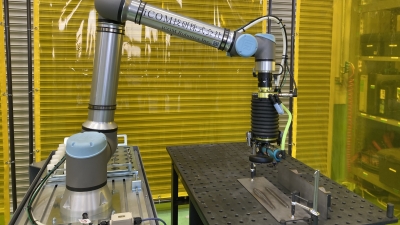
前編では産業用ロボットに関わる研究分野として、②の3Dセンシングをメインに取り上げた。ばらばらに積まれた物体をピッキングする時に使うロボットの視覚システム、つまりロボットの“目”の役割を果たすシステムの研究だ。
ばら積みピッキング用の視覚システムは、主に製造業の生産ラインなどで使われる。一方で、橋本教授は最近、一般家庭で求められる視覚システムの研究にも力を入れる。
特定物体認識と一般物体認識
生産ラインと一般家庭では、ロボットの“目”に求められる技術にどのような違いがあるのか。
あらかじめ決められた物体が流れる生産ラインでは、「どんな物が流れてきたか」の認識は不要で、「物体の位置や姿勢」だけをロボットが把握できればいい。つまり、ロボットの視覚システムに求められるのは、物体がどこにどう置いてあるかを正確に認識すること。「われわれの業界用語で、これを『特定物体認識』と呼ぶ」と橋本教授は話す。
一方、一般家庭は生産ラインとは違い、どんな物がどこに置かれているかが全く分からない。そのため、ロボットにはまず「これはコップ」「これはスプーン」などと、目の前に置かれた物体の名前を正しく認識することが要求される。前述の特定物体認識に対し、これは「一般物体認識」と言う。
名前だけではなく使い方も
だが、物体の名前が分かるだけでは意味がない。
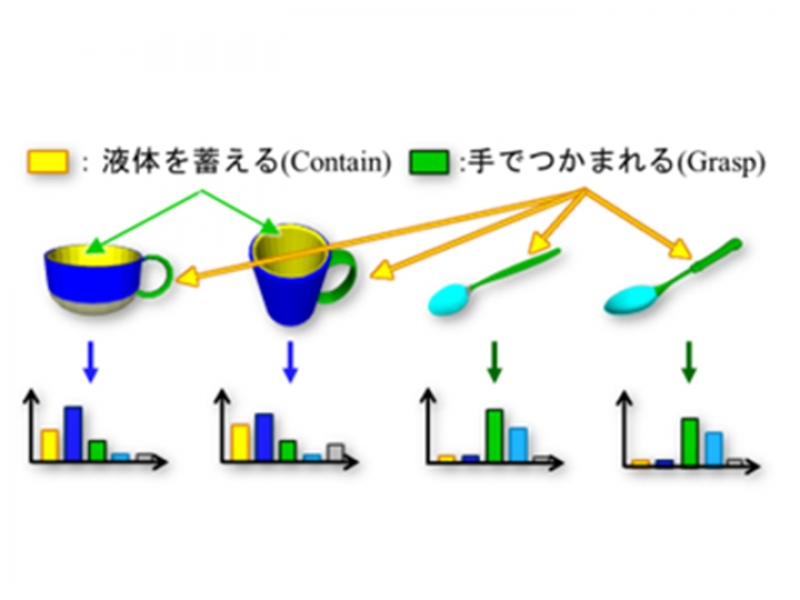
「コップで液体を蓄える」「スプーンですくう」など、その物体が持つ機能も含めて認識できなければ、ロボットは次の動作に移れない。
橋本教授は「人であればスプーンを見ただけで、どの部分を持ち、どうすくうかを知っている。しかし、ロボットだと目の前の物体の名前が『スプーン』と分かっても、そこから先に進めないのが現状」と語る。
そこで橋本教授は2015年、物体の機能をロボットに認識させる研究に着手した。コップやスプーンなどの道具の形状を基に、その形状から考えられる機能、つまり道具の使い方を人工知能(AI)で推定する機能認識のシステムを新たに開発した。


この記事を読んだ方へのオススメ記事








産業用ロボットに関する基礎知識 BASIC KNOWLEDGE


ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年7月号の特集は「変種変量時代の勝てる現場~柔軟性と生産性を両立する鍵~」です。電子版も販売しております。詳しくは当欄の下部から。
