[気鋭のロボット研究者vol.4]ロボットに物体を認識する“目”を【前編】/中京大学橋本学教授

連載4回目を迎えた今回は、3つの分野のセンシング・情報処理技術を主な研究テーマに掲げる中京大学の橋本学教授を紹介する。橋本教授は、産業用ロボットに関わる分野では、ばらばらに積まれた物体をピッキングする時に使われるロボットの視覚システム、つまりロボットの“目”の役割を果たすシステムについて研究する。2013年には、ばら積みされた物体の位置や姿勢を効率的に認識できる「ベクトルペアマッチング」という独自のアルゴリズム(プログラムの問題解決手順や計算方法)を開発した。
研究テーマは3分野
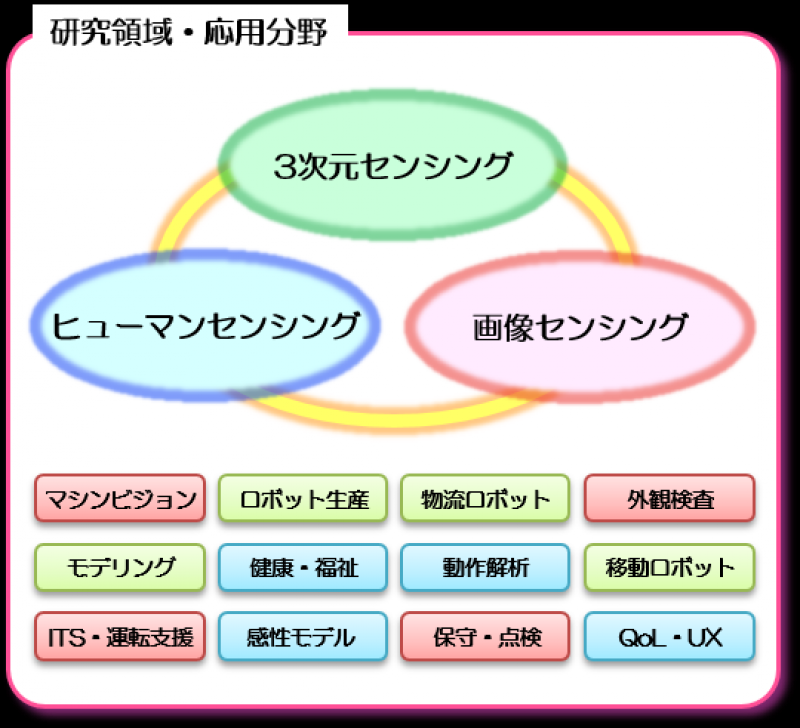
橋本学教授の研究テーマは①画像センシング②3次元センシング③ヒューマンセンシング――の3分野にわたる。
①の画像センシングは、カメラで撮影した画像を処理して、物体の位置決めや外観検査に生かす研究。「研究室を立ち上げた時からずっとやっている」と橋本教授は言う。
一方、③のヒューマンセンシングは、センシング技術で人の表情や動作を分析する研究だ。
独自の物体認識アルゴリズムを開発
3つの研究テーマの中で、産業用ロボットと密接に関わるのは②の3次元センシング。
橋本教授は中でも、ばらばらに積まれた物体をピッキングする時に使うロボットの視覚システム、つまりロボットの“目”の役割を果たすシステムについて研究する。ロボットに物体を認識する“目”を持たせるため、日夜研究に励む。
橋本教授は「ばら積みされた物のピッキングで重要なのは、無造作に置かれた物の位置と姿勢をロボットがいかに正しく認識できるかだ」と語る。
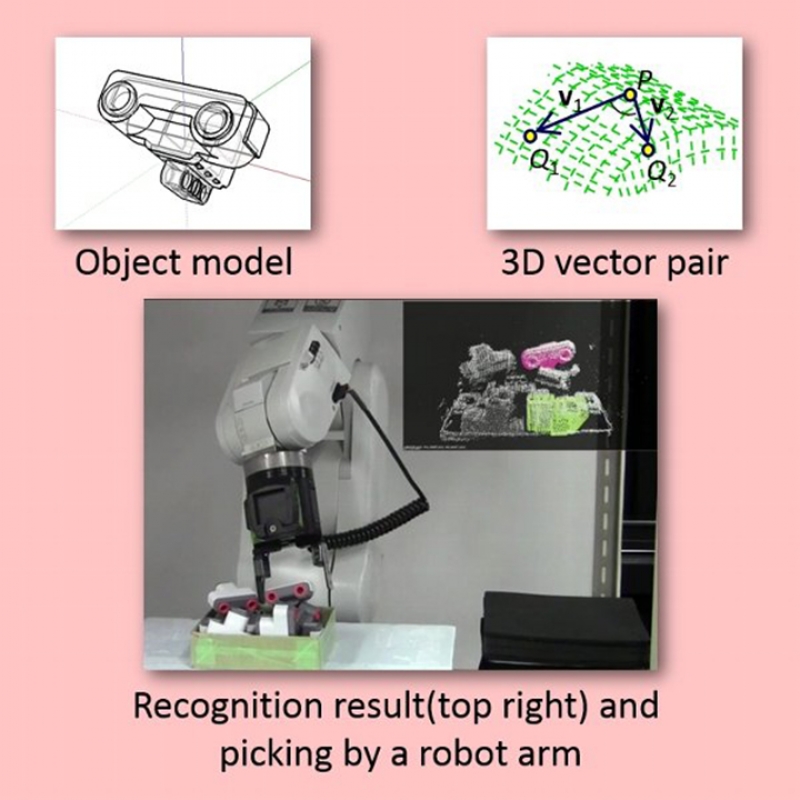
そこで、2013年に「ベクトルペアマッチング」という独自の物体認識のアルゴリズムを開発した。センサーを使って、ばら積みされた物体の膨大な点群データを集める。点群データとは点の集合体で、物体の形状を無数の点で表現するイメージだ。
ベクトルペアマッチングでは、センサーで取得した膨大な点群データの中から、特徴的な3点を自動で抽出する。

なぜ3点なのか。
3つの点を選べば、始点を共有する2組のベクトル(大きさと方向を持った量)ができる(上の図の「3D vector pair」参照)。ベクトルが2組あるから、ベクトルペアと呼ばれる。
つまり、ベクトルペアマッチングとは、自動抽出された特徴的なベクトルのペアと、あらかじめ登録した対象物の3次元モデルデータを照合(マッチング)することで、物体の位置や姿勢が認識できる仕組みだ。
どの3点を選んでも代わり映えしにくい球体などの照合にはベクトルペアマッチングは生かせない。だが、特徴的な部分が少しでもあれば、その部分を起点に点群データと対象物の3次元モデルデータを照合できるのが特徴だ。
「際立った特徴を持つ形状だけを使うので、データ量が少なく高速に照合でき、照合のミスも少ない」と橋本教授は語る。
国際大会で6位入賞

ベクトルペアマッチングは配送センターでのピッキング作業などに生かせる。この技術を搭載した、物体を認識する目を持ったロボットは、米国の大手通信販売会社アマゾン・ドット・コムが2015年に開いたロボットのピッキング技術を競う国際大会で大きな成果を残した。棚に置かれた製品の形状認識にベクトルペアマッチングの技術が大きく貢献。橋本教授らのチームは、見事6位入賞に輝いた。橋本教授は今も、物体認識の研究に努める。だが、最近は物体認識だけではない、より高機能なロボットの“目”の開発を目指しているという。後編では、さらに進化したロボットの目の詳細をリポートする。――つづく(ロボットダイジェスト編集部)


この記事を読んだ方へのオススメ記事






産業用ロボットに関する基礎知識 BASIC KNOWLEDGE





ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年6月号の特集は「RTJで“現場”が変わる!~最新ソリューションは愛知に~」です。電子版も販売しております。詳しくは当欄の下部から。
