【特集】[集結! 自動化の最新提案vol.8]次世代技術、続々【前編】
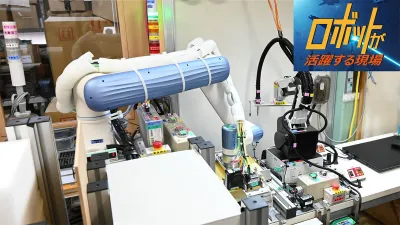
自動化ニーズの高まりに加え、新型コロナウイルス禍も追い風に、産業用ロボットの需要は高まる。ニーズの高度化やロボットの未活用分野の開拓も視野に、次世代技術の研究開発も進む。中心は新エネルギー・産業技術総合開発機構(NEDO)だ。「次世代人工知能・ロボット中核技術開発」などのテーマで、産官学が連携して次代を担う技術開発のプロジェクトが多数走る。直近1年間にNEDOが発表した主な研究開発の成果をまとめた。前編ではハンドの新提案2つを紹介する。
可変剛性機構付きロボットハンド

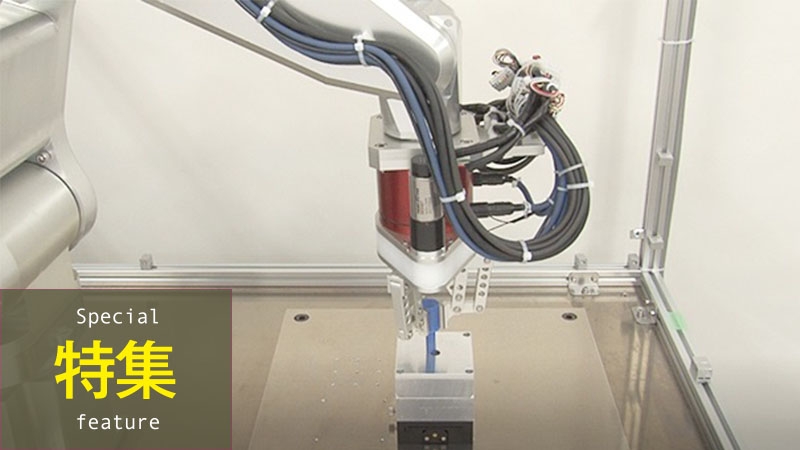
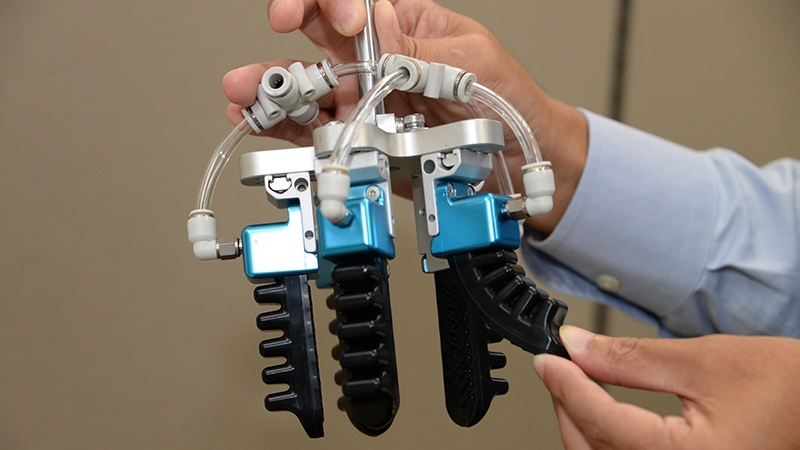
NEDOは昨年12月、ダブル技研(神奈川県藤沢市、和田博社長)や都立産業技術高等専門学校と共同で、さまざまな形状の物をつかめ、動作に応じてハンドの姿勢を固定できる「可変剛性機構」付き3本指ロボットハンド「D-Hand Type R」を開発した。
このロボットハンドは、1つの駆動装置で各指が物の形状にならい、把持対象物の複雑な形状に対応できる。各指の姿勢を任意の位置で固定(ロック)する機構で、ハンドリングの位置決め精度の向上を実現した。
これまでつかむ物に応じてロボットハンドを交換して対応した生産ラインや、多品種を扱う物流倉庫などでのピッキング作業の自動化、ロボットハンドの導入コスト低減への貢献が期待できる。
生産現場で使われるロボットハンドは2本の指で物を挟んでつかむ2爪グリッパー型が多く、対象が限定的で、物の形状によってロボットハンドを交換する必要がある。また、複雑な形状の物をつかむには、専用のロボットハンドを用意する必要があり、2爪グリッパーのような単純な機構ではつかめないものも多い。そこで、多様な形状の物をつかめる産業用3本指ロボットハンドのニーズが高まっているという。
物をつかむ時に、1つの駆動装置だけで複数の指の関節を動かす機構は、各指が曲がる時につかむ物の形状にならう。一方、この機構による制御は遊びがあり外からの力に弱く、つかんだものを固定できない課題があった。従来のならった状態でつかむだけでは遊びを持った状態だが、ならった状態で各指を固定することで、外力の影響を受けにくくし、その姿勢を保てる。
製造、物流業界などでの単純な搬送だけでなく、ロボットハンドの剛性を変化させることで加工工程や組み立て工程の作業ができる。
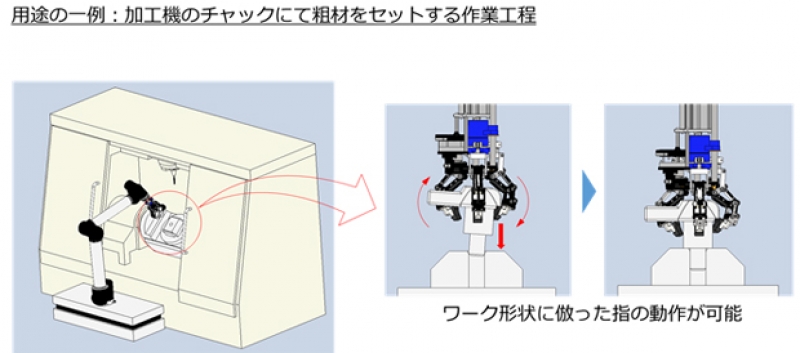
例えば加工機の工作物保持具(チャック)に粗材をセットするような作業工程で、人が手で作業する際は、時にはつかんだものが挿入部にならうように力を抜き、時には逆に力を入れて押し込む。開発したロボットハンドも同様に、指の姿勢を固定できる可変剛性機能を取り入れることで、柔軟性が必要な手作業の代替や多品種ピッキング作業の自動化が可能になった。


この記事を読んだ方へのオススメ記事






産業用ロボットに関する基礎知識 BASIC KNOWLEDGE


ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年7月号の特集は「変種変量時代の勝てる現場~柔軟性と生産性を両立する鍵~」です。電子版も販売しております。詳しくは当欄の下部から。
