AMR搭載のロボットアームをビジュアルフィードバックで制御/チトセロボティクス
チトセロボティクス(東京都文京区、西田亮介社長)は8月22日、独自開発のロボット制御ソフトウエア「クルーボ」を活用し、無人搬送車(AGV)や自律移動型搬送ロボット(AMR)に搭載したロボットアーム(モバイルマニュピレーター)の制御を実現したと発表した。
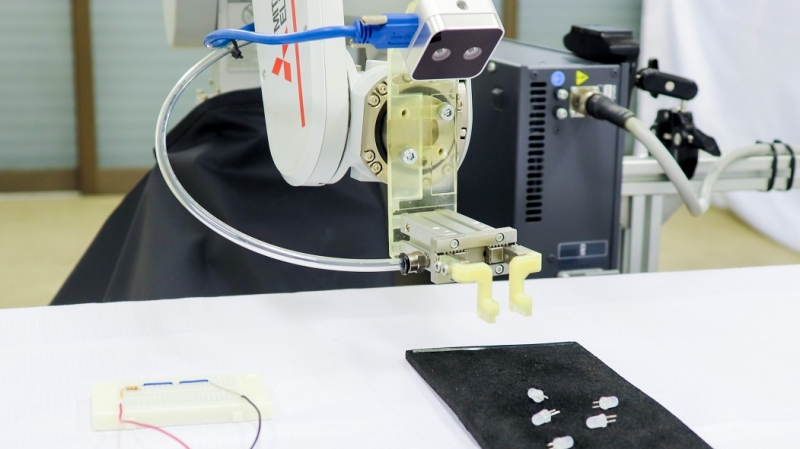
クルーボは、複数のカメラで取得した情報に基づいてロボットを制御するビジュアルフィードバック制御のソフト。AMRは高精度な位置決めができないため、AMR搭載のロボットアームでは精密な作業はしにくいが、カメラ映像を基に作業対象物(ワーク)などの位置や姿勢を認識し、リアルタイムに動作経路を生成することでこの問題を解決した。
発表したデモ映像では、ランダムに置いた発光ダイオード(LED)を基板に挿入する作業を披露した。
「私たちの目標は、産業自動化の進化を通じて現場生産性を向上させること。産業用ロボット制御ソフト『クルーボ』により、モバイルマニピュレーターの器用さと精密性を向上し、製造業界に新たな可能性を開きたい」と西田社長はコメントを発表した。


この記事を読んだ方へのオススメ記事






産業用ロボットに関する基礎知識 BASIC KNOWLEDGE

月刊生産財マーケティング
MAGAZINE
ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年7月号の特集は「変種変量時代の勝てる現場~柔軟性と生産性を両立する鍵~」です。電子版も販売しております。詳しくは当欄の下部から。
