[気鋭のロボット研究者vol.15]ロボの危険性を可視化する【前編】/埼玉大学大学院 琴坂信哉准教授
安全柵なしで使える協働ロボットや、現場を行き交う無人搬送車(AGV)の普及が広がり、作業時の人とロボットの間隔は以前よりも格段に近くなった。その分、ロボットが人に危害を加える危険性も高まった。危険への対処は、現状ではシステム構築者の感覚に頼らざるを得ない。そこで琴坂信哉准教授は危険性を論理的に解析しようと取り組む。
ロボットと人が接触する確率を求めた
琴坂信哉准教授は、ロボットと人との接触被害の発生確率を解析する。
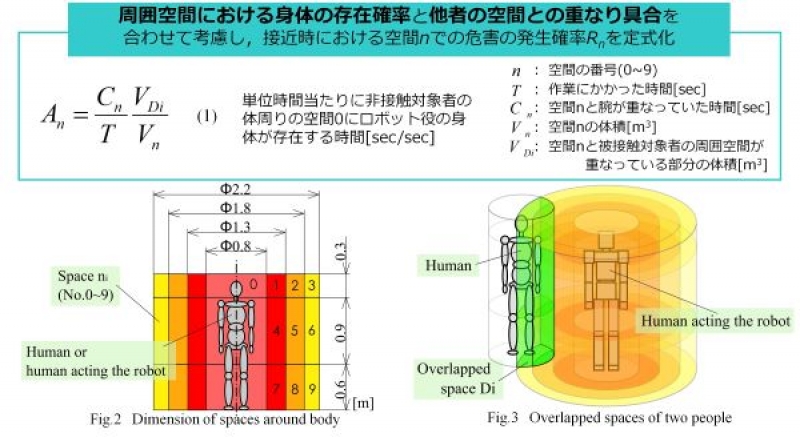
ロボットの周囲の空間ごとに、危険性は変わる。そこでまず、ロボットからの距離別に周囲を9つに分けて考えた。空間別の接触の発生確率は①人が近づく頻度②その空間をロボットの可動部が行き交う確率――の掛け算で算出できると仮定。計算式を立て、正当性を確かめた。
計算式の実証に有効なのは、人の近くでロボットを作業させて事故を起こして解析すること。ただ「安全面だけでなく倫理面でも問題がある」(琴坂准教授)。
代わりに「極限まで高度になったロボットは、人間と同様に判断をして動作する」と考えた。その前提で、普段通りに過ごす人が居る場所で、ロボット役の人を行動させる実証方法を考案した。
清掃ロボット役の学生が掃除機をかけた

実験では、清掃ロボット役の学生が研究室内に掃除機をかけて回った。
この場合、①は「一般学生の周囲をロボット役の学生が清掃する頻度」、②は「ロボット役の学生が動かした手足が行き交った頻度」にあたる。計算式が正しければ、この2つで接触の発生確率が算出できる。
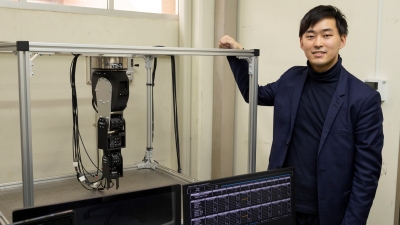
そこで、ロボット役の学生の関節に目印を付けて行動を記録するモーションキャプチャーを実施。動作を解析した。
その結果、「人と接近しながら掃除機を伸ばす動作」で接触の発生確率が最も高く、10.3%を記録した。
危険性の判断によく使われる「ロボットと人の距離」だけでなく、ロボットの動作内容も考慮して危険性を評価できた。「工場向けの産業用ロボットなどによる接触の発生確率の分析にも計算式を応用できる」と胸を張る。
(ロボットダイジェスト編集部 西塚将喜)
琴坂信哉(ことさか・しんや)1989年東洋大学工学部卒。91年同大学工学研究科博士課程前期修了、95年埼玉大学理工学研究科博士課程を修了し、理化学研究所奨励研究員。各種研究員を経て、2001年埼玉大学工学部講師。02年同助教授。07年から現職。「日常生活へのロボットの普及には、一般市民に対するロボットの安全教育も必要」と訴え、安全セミナーの講師も積極的に引き受ける。東京都出身の57歳。


この記事を読んだ方へのオススメ記事







産業用ロボットに関する基礎知識 BASIC KNOWLEDGE
関連キーワード



ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年6月号の特集は「RTJで“現場”が変わる!~最新ソリューションは愛知に~」です。電子版も販売しております。詳しくは当欄の下部から。
