[気鋭のロボット研究者vol.26] 見ず触れず検知するロボットハンド【後編】/大阪大学 小山佳祐助教

大阪大学の小山佳祐助教が開発した近接覚センサーをロボットハンドに組み込むと、カメラを使わず手探りで対象物(ワーク)をつかむピッキングシステムを作ることができる。従来のピッキングシステムに比べ安価でコンパクトな構成になり、ロボティクスの最後のとりでといわれるロボットマニピュレーションの難しさを打破する一手にもなる。
人にない感覚をロボットに

人の触覚は非常に高性能で、機械で再現することはとても難しい。ロボットハンドが人の手のように柔軟に物をつかめない要因の一つだ。
そのため、ロボットで何かを操作したり物をつかんだりするロボットマニピュレーションは、ロボットに関する技術の中でも難易度が高い。
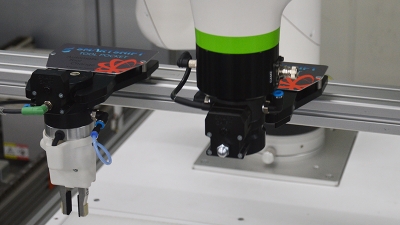
小山佳祐助教が開発したセンサーが実現する近接覚は、見たり触れたりせずにものを認識するため、人にはない感覚とされる。ワークとの距離や傾きを数cm先から高精度かつ高速で認識するため、「人が目隠しをして手探りでワークをつかむような動きができる」と言う。
ロボットの進化に一役
実験では、ねじをバラ積みしたケースを動かしても、ケースに追従しながらねじをつかむことができた。実際の現場では、近接覚センサーだけでなく他のセンサーと組み合わせることで、つかむ成功率が高くなる。
「3Dカメラなど高価なセンサーを使う必要がなく、シンプルで安価なピッキングシステムを構築できる」と小山助教は語る。弱点は、光を使うため現時点では水や油のかかる現場では使えないことと、経路を自動生成するロボットとは相性が悪いことだ。
小山助教は、同センサーを使ったソリューションの開発や同センサーの販売を手掛ける大阪大学発のベンチャー企業Thinker(シンカー、大阪市中央区、藤本弘道社長)の取締役も務める。社名には「ロボットの進化(シンカ)を加速させる」との思いが込められており、「近接覚センサーをうまく使えば、きっとロボットの進化に貢献できる。具体的なソリューション開発を進める」と意気込む。
――おわり
(ロボットダイジェスト編集部 松川裕希)
小山佳祐(こやま・けいすけ)
2017年電気通信大学大学院情報理工学研究科知能機械工学専攻博士課程修了、博士(工学)。同年東京大学大学院情報理工学系研究科特任助教、19年10月客員研究員。19年4月大阪大学大学院基礎工学研究科招聘教員、10月助教。日本機械学会会員、日本ロボット学会会員、計測自動制御学会会員。電子工作や鉱物結晶のDIYが趣味。和歌山県出身の33歳。


この記事を読んだ方へのオススメ記事







産業用ロボットに関する基礎知識 BASIC KNOWLEDGE



ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年6月号の特集は「RTJで“現場”が変わる!~最新ソリューションは愛知に~」です。電子版も販売しております。詳しくは当欄の下部から。
