[気鋭のロボット研究者vol.24] 思いつきをやってみる【前編】/近畿大学 柴田瑞穂准教授
近畿大学の柴田瑞穂准教授は、ロボットに関して「やればできそうだが、まだ誰も本格的に実験したことのない手法」を、まじめに評価、検討する。ロボットの外装を樹脂に置き換えるとどうなるのか。センサーや電気回路を真空パックするとどうなるのか。「思いついたことをやってみるのは、研究のフィールドではとても重要」と話す。
軽量化のメリットは大

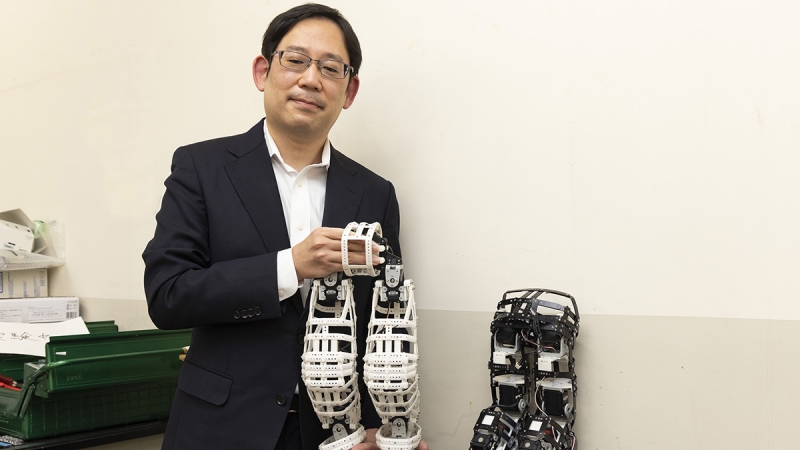
一般的に産業用ロボットは重く、小型でも数十kg、数百kgあるのが普通だ。それは協働ロボットでも同じ。それだけ重くては、協働型といえ人やものにぶつかると危険だ。劇的に軽量化できれば、衝突してもロボット自身や周囲を傷つけにくく、モーターの出力も小さくて済むなど、多くのメリットを得られる。 柴田准教授はロボットの自重の多くを占める金属製の外装を樹脂に置き換え、しかもフルカバーではなく要所だけを守るフレーム状にした(=写真)。重さはわずか800g。実験では二足歩行タイプのロボットを800mmの高さから落としたが、ロボットは壊れず、床にも目立つ傷はなかった。「位置エネルギーが小さいため、落下しても危険は小さい」と話す。製品化にはフレームの形状などを標準化する必要があり、共同研究も視野に入れる。
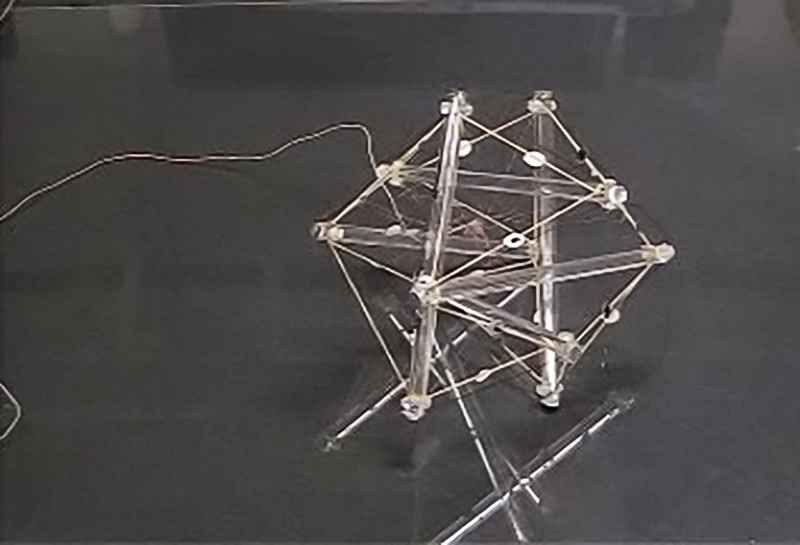
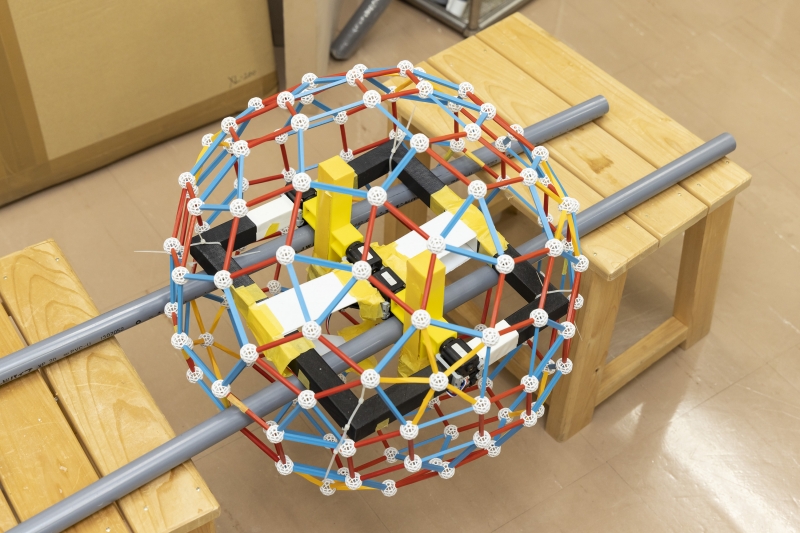
また、圧縮材と張力材で構成され、重心の移動だけで転がり続けるテンセグリティー構造や多面体型のロボットを試作したこともある。部材が極端に少なく移動するロボットとしては最も軽い部類に入る。「不整地の走破性が高いため、農業関連のロボットに使える可能性がある」と言う。 「『何となくできそう』を形にできたときはうれしいが、研究に値する『何となくできそう』を見つけることが難しい」と柴田准教授は語る。 後編では、センサーや電気回路を真空パックし、簡易的に防水性や防じん性を与える研究を紹介する。
――後編に続く (ロボットダイジェスト編集部 松川裕希)
柴田 瑞穂(しばた・みずほ) 2006年立命館大学理工学研究科総合理工学専攻修了。08年立命館大学理工学部ロボティクス学科助教、11年近畿大学工学部知能機械工学科講師。13年同ロボティクス学科講師、近畿大学次世代基盤技術研究所先端ロボット工学研究センター所員。18年近畿大学工学部ロボティクス学科准教授。「ワールドロボットサミット」ものづくり競技委員会委員。福岡県出身の43歳。この記事を読んだ方へのオススメ記事











産業用ロボットに関する基礎知識 BASIC KNOWLEDGE


ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2025年7月号の特集は「プレス・板金加工の真価~人手不足、環境問題に挑む~」です。電子版も販売しております。詳しくは当欄の下部から。
