[注目製品PickUp!Vol.6]協働ロボには協働ハンドを【前編】/シュンク・ジャパン「Co-actグリッパー」

編集部が注目した特徴的な製品を紹介する「注目製品PickUp!」の第6弾は、ロボット本体ではなく、ロボットアームの先端に取り付けるグリッパー(ロボットハンド)を初めて取り上げる。ハンドはつかむ物と直に接触する重要な部位で、ロボットの用途の広がりに合わせて製品開発も活発だ。今回紹介するのはシュンク・ジャパン(東京都品川区、谷本昌信社長)の「Co-act(コ・アクト)グリッパー」。国内では珍しい、協働ロボット用のハンドだ。
「つかむ」に特化し70余年
シュンク・ジャパンはドイツに本社を置くメーカー、シュンクの日本法人だ。シュンクはロボット用のハンドや周辺機器と、工作機械用のクランプ装置 (被加工物や切削工具の把持用器具)の2本柱で事業を展開する。どちらも、対象物を「しっかりつかむ」ための装置だ。
1945年に創業し、9つの工場と3400人の社員を抱え、世界50カ国に製品を販売する。
「欧州ではよく知られたメーカーで、ハイエンドのロボットハンドでは世界トップシェア。多少値が張るけれども高品質で作りが堅牢な点が特長。自動車で言えばメルセデス・ベンツのようなブランド」とマーケティンググループの川村康士マネージャーは言う。
協働の本場、欧州から

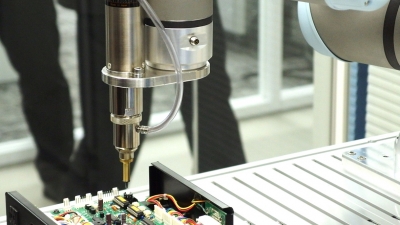
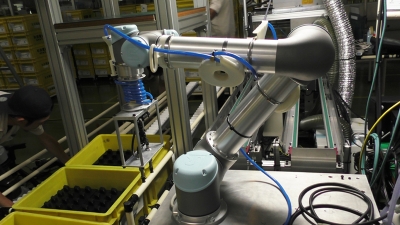
同社が力を入れる製品の一つが、協働ロボット用のハンド「Co-actグリッパー」だ。近年、安全柵で囲まずに人と同じ空間で働ける協働ロボットが注目を浴びる。日本でも協働ロボットは注目の的だが「欧州では日本よりも早く浸透し、すでに普及期に入った。これまで世界全体で約4万台の協働ロボットが販売されたとみられるが、納入先の多くは欧州」(川村マネージャー)。
協働ロボットの本場とも言える欧州で、Co-actグリッパーは2016年末に発売された。両側から挟み込んで物をつかむ2爪の平行ハンドで、指を挟まれてもけがをしないよう把握力を140N(約14.3kg重)までに抑制。接触してもけがをしにくい、丸みを帯びた形状を採用した。
協働ロボットを柵なしで設置する場合、システム全体で危険がないか事前に確認するリスクアセスメント(リスクの確認と対処)が必要になる。リスクアセスメントをクリアするうえで協働用ハンドの採用は必須ではないが、協働ロボット本体に加え、ハンドも安全性が高いと証明できればリスクアセスメントをクリアしやすい。
同じ企業の記事
>>ロボットシステムの柔軟性を高める製品群を発表/シュンク・ジャパン
>> [ショールーム探訪vol.17]顧客の声ダイレクトに拾い上げる/シュンク・ジャパン「CoLab」
>>マグネットグリッパーに新バリエーションが登場/シュンク・ジャパン
>>新技術で繊細な薄物搬送を可能に/シュンク・ジャパン
>>本気で協働ロボ用ハンドの世界シェアトップへ/シュンク・ジャパン
>>爪が80mm可動する電動グリッパーを発売/シュンク・ジャパン
>>いつか、あなたの街にも?! キャラバンカー、発進/シュンク・ジャパン
>>[注目製品PickUp!Vol.6]協働ロボには協働ハンドを【後編】/シュンク・ジャパン「Co-actグリッパー」


この記事を読んだ方へのオススメ記事







産業用ロボットに関する基礎知識 BASIC KNOWLEDGE



ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年6月号の特集は「RTJで“現場”が変わる!~最新ソリューションは愛知に~」です。電子版も販売しております。詳しくは当欄の下部から。
