本気で協働ロボ用ハンドの世界シェアトップへ/シュンク・ジャパン

ドイツのロボットハンドメーカー、シュンクは協働ロボット向けの提案を強化する。日本法人のシュンク・ジャパン(東京都品川区、谷本昌信社長)が出展した昨年12月の「2019国際ロボット展」(iREX2019)では、出展製品の大半が協働ロボット向けハンドだった。小間内には複数社の協働ロボットを設置し、新製品や人気製品を実演展示した。
しっかりつかむ製品群

シュンクはドイツに本社を置くロボットや工作機械の周辺機器メーカー。対象物を「しっかりつかむ」製品に特化しており、ロボット用のハンドや関連機器と、工作機械用のクランプ装置 (被加工物や切削工具の把持用器具)で事業を展開する。
同社は世界でもいち早く、2016年に協働ロボット向けのハンド「Co-act(コアクト)グリッパー」を発売した。既に産業用ロボットでは世界トップクラスのシェアを誇るが、今後はさらに協働ロボット向けの提案を強化するため、ラインアップを短期間で大幅に増やす方針だ。
協働ロボット向けといえばシュンク

その意気込みを昨年末の国際ロボット展でも示した。シュンク・ジャパンは小間内に8台のロボットを置いたが、うち6台は協働ロボット。
しかも、ファナックや三菱電機、ドイツのKUKA、デンマークのユニバーサルロボット(UR)など複数社の協働ロボットで実演し、各社製品への対応をアピールした。
同社マーケティンググループの川村康士マネージャーは「協働ロボット市場は全世界で、これから本格的に広がる。それまでに『協働ロボット向けハンドといえばシュンク』というブランドを確立したい。そのためにシュンクは本気になりました」と、展示の意図を語った。
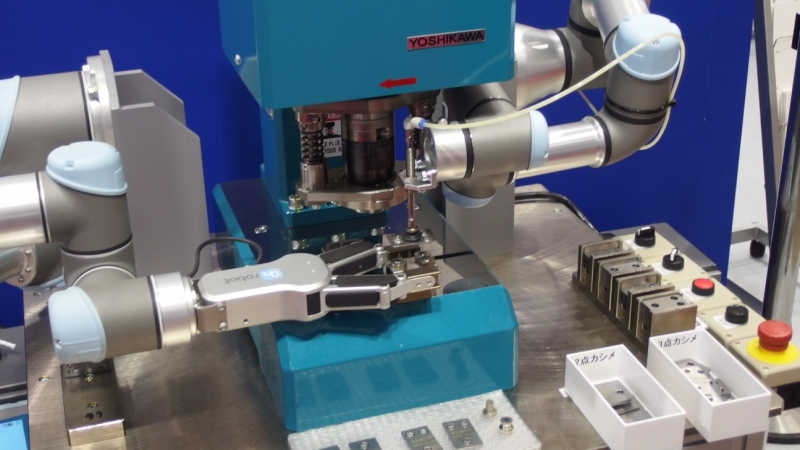
8kgの対象物を持てる協働向け最強ハンド
ブースで注目を集めたのは、ロングストロークタイプの新製品「コアクトEGL-C」だ。両側から挟み込んで物をつかむ2爪の平行ハンドで、最大把持力 は450 N、8kgまでの対象物を把持できる。そのパワーは協働ロボット向けに限ると、世界最高クラスという。今年3月の発売を予定する。
近年、協働ロボットでは可搬質量の大きな機種が増えている。その時流に対応するため、開発した。ハンドの重量は2kgほどで、可搬質量15kgクラスの協働ロボットでの使用に向く。
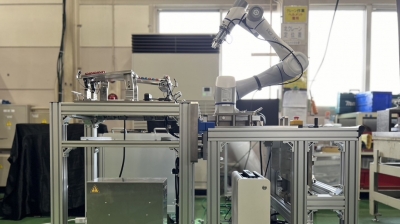
展示では、KUKAの協働ロボット「LBR iiwa(イーバ)」を使い、人との協働による工作機械用クランプ装置部品の箱詰め作業を実演した。
まず協働ロボットが、部品を組み立て前の段ボール箱の上に置く。次に作業者が段ボール箱を組み立てて梱包。その箱を協働ロボットが持ち上げて次工程に運ぶ。
実演では、3種類のクランプ部品をそれぞれ梱包した。箱は1種類だが、中の部品はそれぞれ重さが異なるため、梱包後は各箱の重さを計測して部品の種類を判別し、仕分け作業までロボットが担った。
部品の重量はいずれも1~2kg程度で、もしロボットを使わずに人が同様の作業をした場合、部品を持ち上げる際の負担は大きく、長時間の連続作業は難しい。そこで、力の必要な工程をロボットに担わせた。
同じ企業の記事
>>ロボットシステムの柔軟性を高める製品群を発表/シュンク・ジャパン
>> [ショールーム探訪vol.17]顧客の声ダイレクトに拾い上げる/シュンク・ジャパン「CoLab」
>>マグネットグリッパーに新バリエーションが登場/シュンク・ジャパン
>>新技術で繊細な薄物搬送を可能に/シュンク・ジャパン
>>爪が80mm可動する電動グリッパーを発売/シュンク・ジャパン
>>いつか、あなたの街にも?! キャラバンカー、発進/シュンク・ジャパン
>>[注目製品PickUp!Vol.6]協働ロボには協働ハンドを【後編】/シュンク・ジャパン「Co-actグリッパー」
>>[注目製品PickUp!Vol.6]協働ロボには協働ハンドを【前編】/シュンク・ジャパン「Co-actグリッパー」


この記事を読んだ方へのオススメ記事






産業用ロボットに関する基礎知識 BASIC KNOWLEDGE


ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年5月号の特集は「AIブームが広げる市場~成長領域のニーズに応えよ~」です。電子版も販売しております。詳しくは当欄の下部から。
