[気鋭のロボット研究者vol.35]柔軟な発想で精度向上を【後編】/明治大学 田島真吾 専任講師

垂直多関節ロボットを活用した切削加工に注目が集まるが、加工精度や剛性の低さが実用化のハードルになる。田島真吾専任講師は軌跡生成法に着目し、ロボットの性能を問わず加工精度を高める研究に取り組む。また2台のロボットを組み合わせて運用するなど、柔軟な発想でロボット切削の可能性を広げる。
姿勢の変化を考慮した軌跡
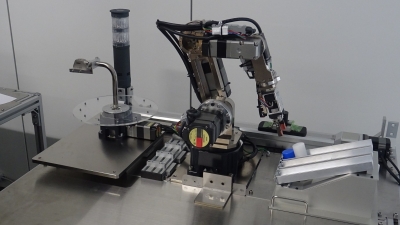
ロボット切削は工作機械と比べ、加工精度や剛性が低いとの課題がある。田島専任講師は加工精度の向上を目的に、ロボットの動作経路を正確に制御するアルゴリズム(計算法)を構築した。長い距離の切削でも直線的な動作を実現できるようになるが、剛性の低いロボットでは切削時の反力で位置ずれが発生する。
そこで田島講師は姿勢の変化を考慮した軌跡生成法の検証も進める。設定したロボットの軌跡と、反力の影響を受けた実際の加工結果を基に、より適切な軌跡を生成する。田島専任講師は「単純化して説明すると、対象物(ワーク)の端から0.5mm削る設定をして、実際には0.4mm削れるとする。その場合は0.6mm削る設定にすれば狙い通りの加工結果が出る、との考え方」と言う。

「高剛性のロボットも増えているが、軽金属を削れるようになれば次は鉄系材料、その次は難削材と要求レベルは上がる。それに対してロボットの剛性を高めることは一つの有効な手法だが、コストなどの観点から異なるアプローチも必要」と田島専任講師。
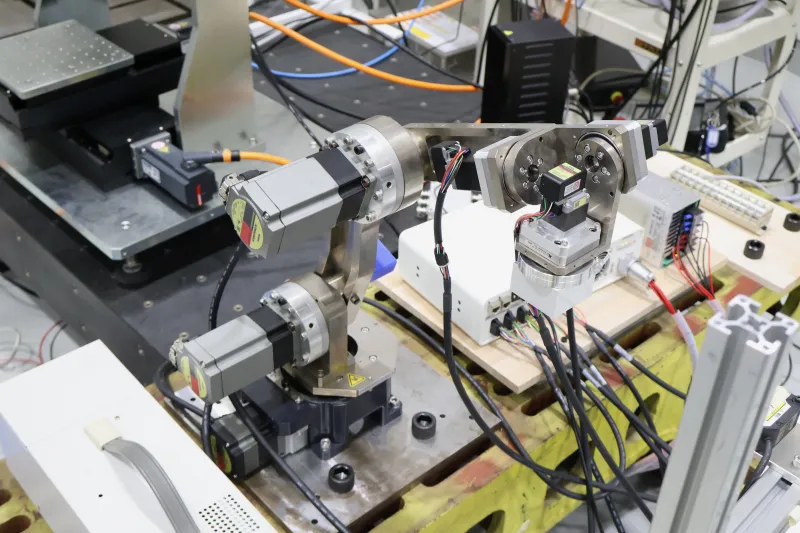
他にも独自性のある加工法の研究に取り組んでおり、その一つが切削時の振動を低減するシステム。「2台のロボットを使い、1台は切削用、もう1台は切削用のアームをつかんで振動を抑える役割。人の手作業で、工具を持つ手にもう片方の手を添えるようなイメージ」と説明する。ロボット切削の可能性を広げるべく、柔軟な発想で研究に臨む。
――終わり
田島真吾(たじま・しんご)
2009年名古屋大学大学院工学研究科電子情報システム専攻博士前期課程修了、ルネサスデザイン(現ルネサスエレクトロニクス)入社。19年米国オレゴン州立大学でPh.D.修了(ロボット工学、機械工学)。同年、東京工業大学(現東京科学大学)未来産業技術研究所助教。24年から現職。趣味はバドミントン。高校時代から続けており、今でも大会に出場する。愛知県出身の41歳。


この記事を読んだ方へのオススメ記事








産業用ロボットに関する基礎知識 BASIC KNOWLEDGE



ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年6月号の特集は「RTJで“現場”が変わる!~最新ソリューションは愛知に~」です。電子版も販売しております。詳しくは当欄の下部から。
