[気鋭のロボット研究者vol.17]動力いらずのハンド【前編】/大阪工業大学 野田哲男教授
ロボットハンド、ロボットシステムの設計手法、安全対策――。これらは全て、大阪工業大学の野田哲男教授の研究領域だ。研究領域の広さは「産業用ロボット研究室」というストレートな名前にも表れている。前編では、ロボットの技術的な課題の一つと言われるロボットハンドの研究を紹介する。ロボットの普及には重要なテーマだ。
ハンドを軽くするには

ロボットハンドには、軽さが求められる。限りあるロボットの可搬質量を有効に使うには、つかむ対象物以外は軽ければ軽い方がいい。また、モーターやバルブなど、ハンドを動かすための部品は重量に占める割合が高い。
大阪工業大学の野田哲男教授は、動力のいらない軽いハンドを研究する。動力いらずと言っても、物をつかんで持ち上げ、運ぶには、何らかの力が必要だ。
野田教授が着目したのは、ロボットの周りにある動力だ。野田教授が指導する産業用ロボット研究室では、コンベヤーのベルトで万力のねじ頭を回して物をつかむ方式や、コンベヤーの動力でベルトを動かして物をすくい取る方式など、さまざまなアイデアを試行錯誤している。
人間の手がお手本
ハンドに動力がいらなくなると、重量を減らせるだけでなく、配線も減り、ランニングコストを削減でき、メンテナンスも簡単になるなど、多くのメリットが期待できる。
ハンドの課題では他に、軟らかい物への対応がある。食品には軟らかい物が多いが、食品の中でも唐揚げや卵、米ではそれぞれつかみ方が違う。特に、軟らかい上にばらばらになる米をうまくつかむのは難しい。
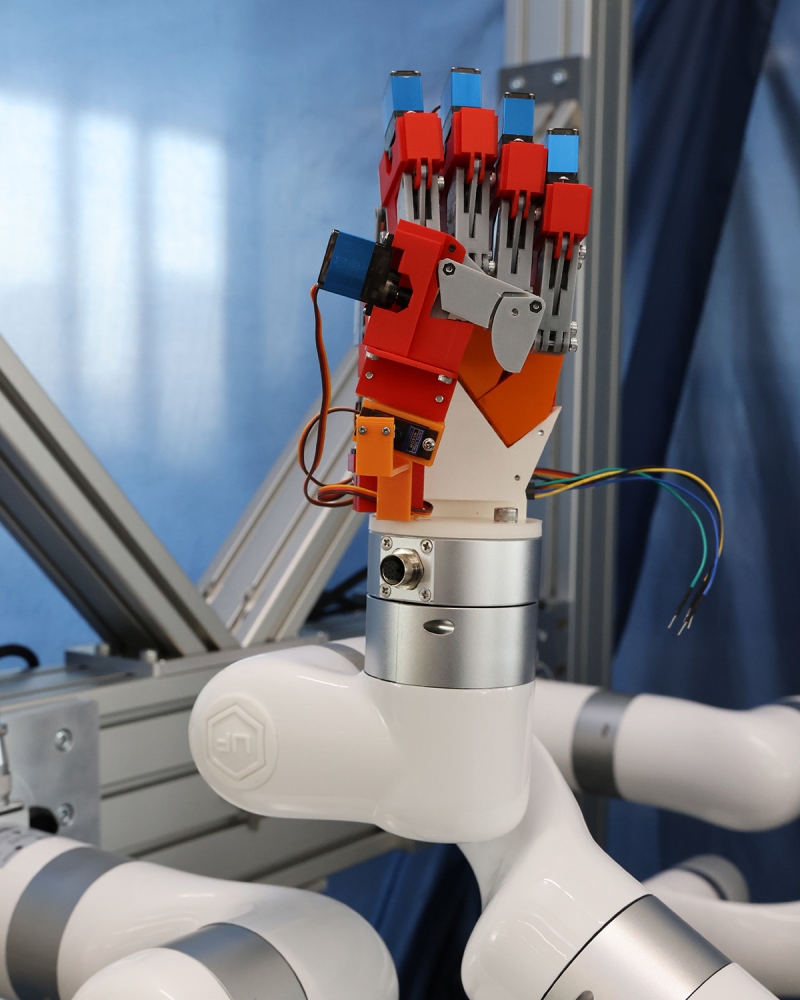
野田教授が研究室の学生とともに開発を進めるのが、人間の手を模した5本指のハンド。「米を包むようにつかみ、運んだ先では米を指先で押し広げ、盛り付けを整えることもできる。複雑な使い方を追求すると、やはり人間の手の形に近づく」と野田教授。製品化も期待される。
――後編につづく
(ロボットダイジェスト編集部 松川裕希)
野田哲男(のだ・あきお)
1987 年大阪大学大学院基礎工学研究科博士前期課程修了、三菱電機入社。2016年奈良先端科学技術大学院大学情報科学研究科情報科学専攻博士課程修了、博士号取得。17年大阪工業大学教授。同年「ワールドロボットサミット」ものづくり競技委員会委員。18年日本ロボット学会フェロー。20年計測自動制御学会システムインテグレーション部門長。大阪府出身の58歳。


この記事を読んだ方へのオススメ記事










産業用ロボットに関する基礎知識 BASIC KNOWLEDGE

ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年7月号の特集は「変種変量時代の勝てる現場~柔軟性と生産性を両立する鍵~」です。電子版も販売しております。詳しくは当欄の下部から。
