[気鋭のロボット研究者vol.14]異物を見つける「目」【前編】/名城大学 田崎豪准教授

自動運転の研究を続ける田崎豪准教授は、名城大学で視覚センサーを取り付けた垂直多関節ロボットの研究に着手する。人工知能(AI)が処理しやすいシステムを作り、ロボットが知らない物でも、どうつかめばいいかを判断できる。形の決まった製品をつかむ工場内での搬送だけでなく、食品や物流などさまざまな品物のある分野にも応用できるという。
自動運転の技術を応用
「最終的にはロボットをまるまる一体作るのが夢」――。
そう話す田崎豪准教授は、企業で自動運転の研究をした後、2018年から垂直多関節ロボットの研究を始めた。研究対象が変わっても、重要になるのは物を認識する「目」だった。
ロボットを工場で使う場合は、決まった形状の物を扱うため、AIに覚えさせやすい。しかし、知らない物や形の変わる物を正しく認識するのは難しい。
「工場以外の、一般の環境でも使えるロボットの開発は難しいが、ニーズは高い。企業出身なので、基礎研究よりも実際に使える技術を目指したい」と田崎准教授は強調する。
まずは単純な形状のつかみ方をAIに教え、形が少し違ってもつかめるようにする。しかしそれだけでは、うまくいかなかった。
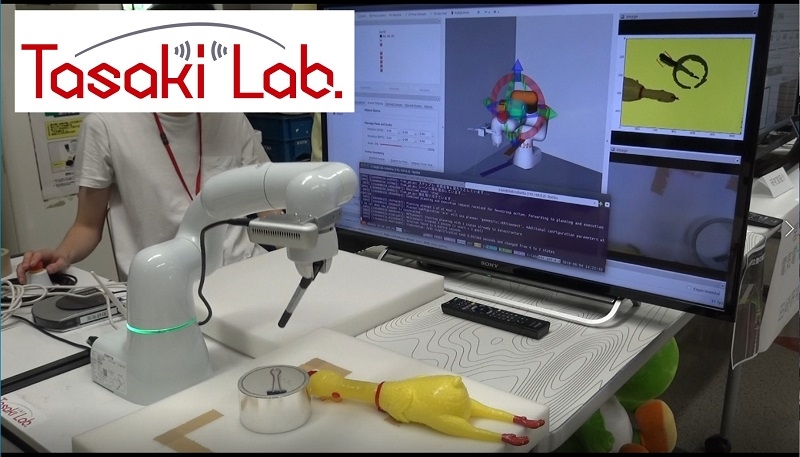
ガムテープで区切った空間内に物を置き、範囲内の物を移動させる指示を出す。しかし当初は、うまく認識できず、張ってあるガムテープや、ロボット本体をつかもうとしたほど。AIが判断するには、余分な情報が多すぎた。
そこで役立ったのが自動運転の地図情報の技術だ。あらかじめ周囲の空間を地図情報としてAIに読み込ませることで、そのデータ以外の物を異物と認識できる。薄い紙幣でもしっかり見つけてつかめる。
「AIは万能ではない。だからAIが楽して認識できるようシステムを用意する必要がある」と田崎准教授は意気込む。
――後編に続く
(ロボットダイジェスト編集部 渡部隆寛)
田崎豪(たさき・つよし)2006年京都大学大学院情報学研究科知能情報学専攻修士課程修了、東芝入社。13年京都大学大学院情報学研究科博士後期課程を修了し、18年名城大学理工学部准教授。同年に開かれたロボットの国際的イベント(ワールドロボットサミット)で経済産業大臣賞とNEDO理事長賞を受賞。米国電気電子学会(IEEE)上級会員。1981年生まれの39歳。三重県出身。


この記事を読んだ方へのオススメ記事







産業用ロボットに関する基礎知識 BASIC KNOWLEDGE




ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年7月号の特集は「変種変量時代の勝てる現場~柔軟性と生産性を両立する鍵~」です。電子版も販売しております。詳しくは当欄の下部から。
