[ロボットが活躍する現場vol.6]これぞ中小企業のロボットシステム! 協働ロボットとからくり装置でコストを抑制/ユタカ精工
協働ロボなら使える

ただ、ロボットシステムを構築するシステムインテグレーター(SIer、エスアイアー)のクフウシヤ(相模原市中央区、大西威一郎社長)から協働ロボットを提案され、考えが変わった。 「加工現場が狭くても安全柵を用意せずに使える。1回の受注数がまとまっている定期的な案件で、加工品の付け替え作業に協働ロボットを使えば、メリットがある」。1回あたり200個を月に3、4回受注する加工品の付け替え作業で導入を決めた。 迷いが完全に消えた訳ではなく、できれば導入費用や運用の手間などのコストを抑えたい。そこでクフウシヤの大西社長に相談した。提案されたのは、工夫が詰まったからくり装置と、製造業仲間のつながりを生かしたコスト削減だった。 重力や慣性を上手に使った装置を随所に設け、ロボットの複雑な動作をなるべく避けた。ロボットの土台やロボットハンド、加工物を収納するワークストッカーなどを製造業仲間と相談しながら設計し、内製したり、仲間に製造を委託した。ユタカ精工の内情を知っている仲間たちだからこそ可能な提案も多かったという。 また幸いなことに、同社のある相模原市は、市を挙げて中小企業での産業用ロボット導入を支援している。市の補助金もあり、ロボット本体も含め総額500万円ほどの負担でロボットシステムを構築できた。
からくり装置を多用した

システム構築をしたクフウシヤの大西社長は、工夫の一例にワークストッカーを挙げる。 ロボットによる加工物の付け替え作業では、ロボットの動作が複雑になることが多い。対象物を収めるケース内に仕切りを付け、等間隔に並べた加工物を順番に持ち上げて機械内部に設置。加工後は機械から取り出して別のケースに順番に並べる。この場合、加工材料を取りに行く位置、収める位置を、毎回少しずつずらす必要があるためだ。 また先端技術を使えば、仕切りなしで無造作にばらばらとケースに入った対象物を、センサーで認識して持ち上げられる。ただ認識用のセンサーが要り、費用が掛かる。 そこでワークストッカーを工夫した。

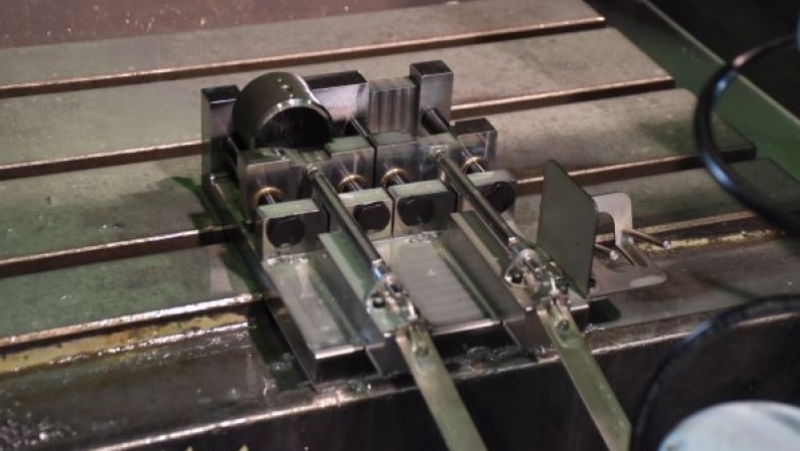
対象の加工物は円筒状で、傾斜があれば転がる。その性質を生かした。ワークストッカーを互い違いの傾斜面で構成。加工前のワークストッカーでは加工物が、常に傾斜の最下部に供給される。ロボットは毎回、そこから持ち上げるだけ。 加工後用の装置ではロボットが傾斜面の頂上に加工物を置く。ロボットハンドで突くと、傾斜面を転がり始め、最下部から順番に並ぶ。ロボットは特定の位置に対象物を置いて、ハンドで軽く突けば動作は完了する。これなら複雑なティーチングもセンサーも要らない。
またハンドも仲間と協力して製作した。下の動画のようにハンド一つで対象物の搬送から工作機械の動作開始のスイッチオン、機械内部にある対象物を固定する器具のロックと解除、機内の切りくずや加工油を風で吹き飛ばす作業までをこなす。 ロボットは30年以上前の工作機械と共に働き、数々のからくり装置に囲まれている。最新なのはロボットだけ。 「身の丈のロボット化」を突き詰めた。そして周辺装置やシステム構築には、仲間の協力が欠かせなかった。
この記事を読んだ方へのオススメ記事








産業用ロボットに関する基礎知識 BASIC KNOWLEDGE




ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2025年7月号の特集は「プレス・板金加工の真価~人手不足、環境問題に挑む~」です。電子版も販売しております。詳しくは当欄の下部から。
