[注目製品PickUp!vol.16]「安全第一」を地で行く協働ロボット【後編】/ダイアディックシステムズ

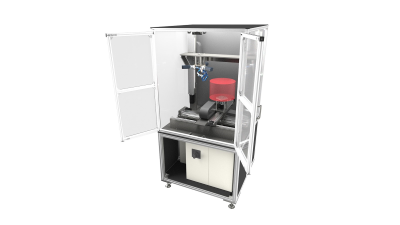
ロボットダイジェスト編集部が注目したロボット関連の製品を取り上げる連載企画「注目製品PickUp!」。16回目を迎えた今回は、電動シリンダーやサーボモーターを製造、販売するダイアディックシステムズ(金沢市、鶴海正隆社長)が2018年10月に発売した協働ロボット「DSR02-400」を紹介する。DSR02-400は、4軸の水平多関節(スカラ)タイプの協働ロボットだ。他社の協働ロボットは垂直多関節タイプが多い中、スカラタイプを採用した理由も、前編で紹介した「本質安全」の考え方にあった。
自社製品の特性生かす

前編では、ダイアディックシステムズが2018年10月に発売した4軸の協働ロボット「DSR02-400」の特徴などを解説した。
最大可搬質量が2kg、動作半径は400mmで、小物部品のピック&プレース(部品を持ち上げ、特定の位置まで運んで下ろす一連の作業)に用途を特化した。
誰でも簡単に使いこなせるよう、ロボットアームを直接動かしながらロボットに動作を覚えさせるダイレクトティーチング機能や、直感的にロボットのプログラムが作成できるソフトウエア「CTCToolR」などを搭載したのも大きな特徴だ。
電動シリンダーやサーボモーターを開発、製造、販売する同社が協働ロボットの開発に着手したのは、発売から1年ほど前。
鶴海正隆社長は「当社のサーボモーターは小型で低出力のものが多い。自社製品の特性を生かせる製品には何があるかと考え、安全柵が不要で人と一緒に働ける協働ロボットに行き着いた」と振り返る。
根本には「本質安全」

他社の協働ロボットを見ると垂直多関節タイプが多いが、DSR02-400は協働ロボットでは珍しく水平多関節(スカラ)タイプだ。なぜだろうか?
「人を傷つけたくてもできない『本質安全』を実現するにはどういう形がベストかを模索した結果」と鶴海社長は話す。
垂直多関節ロボットは構造上、手首から土台に近づくにつれて動かすのに大きな力が必要になり、モーターも大型化する。
鶴海社長は「感覚的には、部品を運ぶ時のエネルギーはモーター出力の2~3割ほどしかなく、残りのほとんどは自重を支えるために使われる。協働ロボットでも垂直多関節タイプの場合、自重を支えるのに大きな動力を生み出すモーターが必要で、安全性と両立するのは難しい。安全性を高めるためにモーターの動力を小さくすれば、ロボットが思い通りに動かなくなる」と説明する。

同社は、自社製の低出力サーボモーターをいかに有効に使えるかを考えた。垂直多関節構造と違い、アームが水平方向にしか動かない水平多関節構造ならば、アームの重量は支柱と土台で支持できる。アームを持ち上げておくための出力が不要になり、モーター出力はアームを水平方向に動かすことだけに使えるため、低出力モーターに最適とこの構造を採用した。
前述の通り、DSR02-400は小物部品のピック&プレースに用途を限定している。これはスカラタイプの構造から導き出された用途だ。
鶴海社長は「6軸の垂直多関節ロボットが自由度の高さから広く普及しているが、ピック&プレースに用途を限定すれば、6軸も要らないことが多い。ピック&プレースに関してはスカラタイプが一番理想に近い構造」と分析する。


この記事を読んだ方へのオススメ記事










産業用ロボットに関する基礎知識 BASIC KNOWLEDGE



ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年5月号の特集は「AIブームが広げる市場~成長領域のニーズに応えよ~」です。電子版も販売しております。詳しくは当欄の下部から。
