[気鋭のロボット研究者vol.3]シンプル制御の鍵は“速さ”/東京大学山川雄司講師【前編】

ロボットで扱いにくい物の一つが、ひもや布などの柔軟物だ。ハンドでつかんだ部分は精密に動かせても、つかんでいない部分の動きを制御するのが難しい。これに対し山川雄司講師は「高速化すればよりシンプルに制御できる」と話す。
ロボットでひもを結ぶ

山川雄司講師の研究テーマの一つが、ロボットでひもや布のような柔軟物をいかに扱うか。
大学院生時代はロボットでひもに結び目を作る研究をした。修士課程のころは視覚センサーや触覚センサーなども使いながら、ロボットに複雑な動作をさせた。この考え方が大きく変わったのが博士課程だ。
「ロボットを高速で動かせば、新体操のリボンのように、ひもはロボットの先端が動いた軌跡をなぞる。これならばシンプルな代数方程式で挙動を計算できると気付いた」(山川講師)。
この原理を使うことで、ひもを一振りするだけで結び目が作れるようになった。
次にこの原理を布に応用。通常はロボットで布を折りたたむには分単位の時間が掛かるが、この方法で二つ折りにするだけならわずか0.4秒だ。
計算上の挙動と実際の挙動にはずれが生じるが、特殊なビジョンシステムで瞬時に画像を取得して解析し、即座に動作を微調整する。
勝率100%のじゃんけんロボット
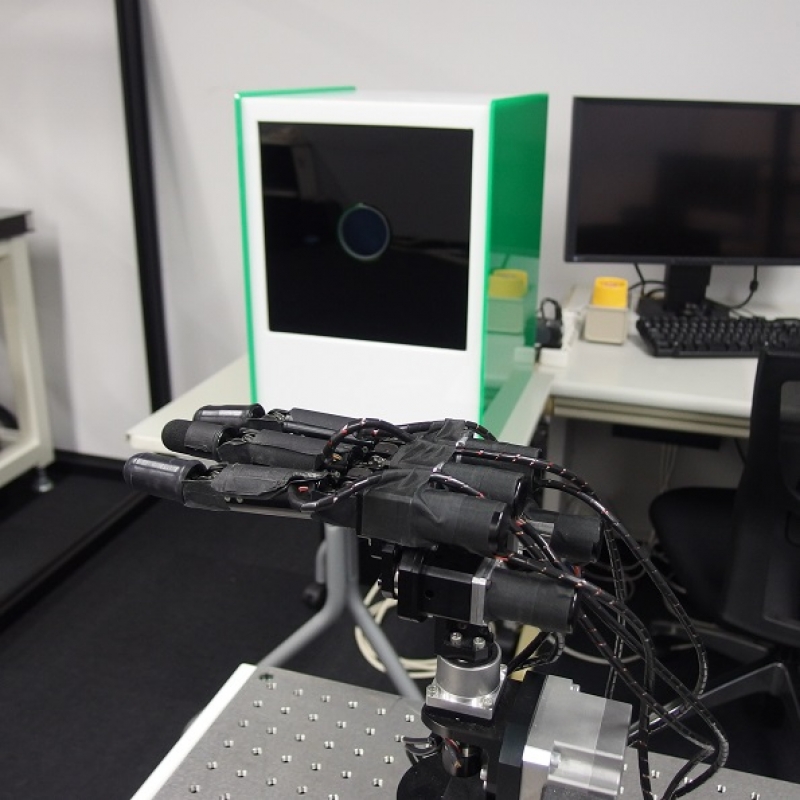
その後、高速な画像解析と制御の技術を生かし、人とじゃんけんすると100%勝てる「勝率100%じゃんけんロボット」を開発した。
人が出した手を読み取って、勝つ手を出す。原理は単純だが、人が認識できないほどの時間差しかないため、全く後出しとは感じられない。
「データ処理方式の検討などの苦労もいろいろあったが、柔軟物でもじゃんけんでも高速化できれば難しい問題をシンプルに解決できる」と山川講師は話す。
——後編に続く
(ロボットダイジェスト編集部)
山川雄司(やまかわ・ゆうじ)
東京大学 生産技術研究所 機械・生体系部門 講師
2006年3月東京大学工学部卒。08年3月年同大学院情報理工学系研究科修士課程修了。11年3月同博士課程修了。11年4月同特任助教。14年4月同助教。17年10月より現職。休日は18年1月に生まれた子どもの世話に追われる栃木県出身の36歳。
※この記事は「月刊生産財マーケティング」2018年10月号に掲載した連載「今に花咲き実を結ぶ」を再編集したものです。


この記事を読んだ方へのオススメ記事










産業用ロボットに関する基礎知識 BASIC KNOWLEDGE

ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年7月号の特集は「変種変量時代の勝てる現場~柔軟性と生産性を両立する鍵~」です。電子版も販売しております。詳しくは当欄の下部から。
