エプソンはさまざまなソリューションで生産現場の難題解決を共に目指す Vol.2

エプソンは「省・小・精の技術」を起点に、常に新たな価値創造へ取り組み、顧客の期待に応えることに挑戦し続けている。その1つとして「生産現場の革新」にも注力する。生産現場での働き手の不足や熟練工の減少、消費者ニーズの多様化などさまざまな顧客の課題がある。それに対してエプソンは総力を挙げて全ての技術を結集させ、顧客と共に課題解決に取り組む。今、生産現場の自動化が進む中、産業用ロボットに求められる作業内容もより精密かつ複雑 になる。今まで自動化を諦めていた難作業、それを可能にするために、エプソンはクラボウ社と共創することで新たな価値創出を実現した。
「人の感覚」が自動化のハードル
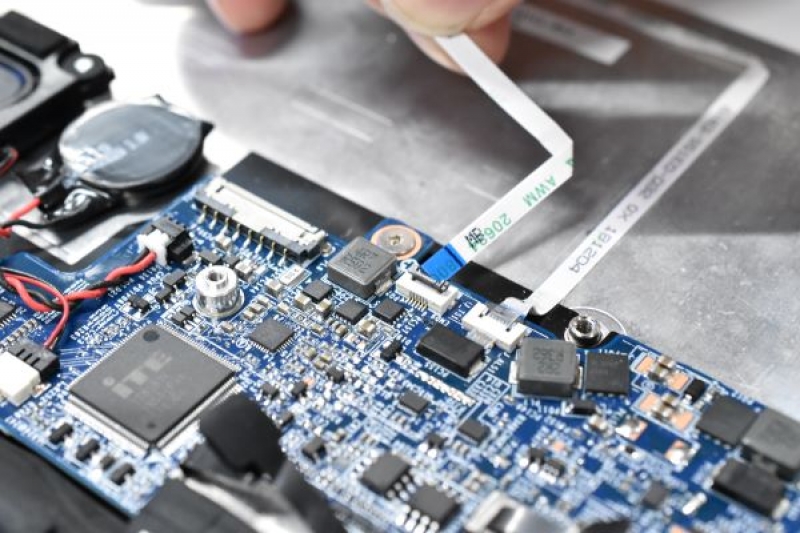
「人の感覚」に頼り、微妙な力加減が必要な作業は多岐にわたる。はめあい、ねじ締め、研磨作業、コネクター挿入など、生産現場では自動化したくてもできずに断念するケースが多い。特に難易度が高いのがケーブルなどのコネクター挿入作業だ。
セイコーエプソン営業本部MS営業部の上田淳也さんは「ケーブルコネクターを挿入部に押し当てた際のはまり具合は『カチッ』と感じる感覚で作業の成否を判断する。人が作業すればそれをリアルに感じることが出来るが、ロボットはそれを感じることができない」と話す。
それらの作業をロボットの正確な位置決めに頼り、稼働プログラミングのみで対処すると、部品とはめ込む位置が0.1mmずれるだけでもエラーとなる。基板実装されるコネクターなどは位置が安定していないことが多く、微妙な誤差が生じやすい。
このような変化に対応するために、人の微妙な力加減に頼らざるを得ず、結果自動化をあきらめる生産現場が多い。
熟練者の力感覚を再現する力覚センサー
難作業の自動化を実現するのが、エプソンの力覚センサーだ。
力覚センサーはロボットハンドに取り付け、力やモーメントの大きさと向きをXYZ方向で検出することができる。その測定値を基に、ロボットに適切な力感覚を与えることで、人手に頼っていた力感覚を再現できる。
一般的な力覚センサーは、感受部をゆがませて力を検出する方式が多い。一方、エプソンの力覚センサーは自社技術である水晶圧電方式を採用。力を加えても変形が少ない水晶の特性を生かすことで、剛性を高めると感度が低くなるという従来の力覚センサーの欠点を克服した。

2つ目の特徴として、微小な分解能が挙げられる。
上田さんは「一般の力覚センサーはノイズが大きく、1N(ニュートン)の力を認識できない場合がある。エプソンの力覚センサーは0.1Nと高精度な分解能を持つ」とアピールする。分解能とは信号をどれだけ細かく検出できるかを示す能力で値が小さいほど高精度になる。この分解能の値が大きいと、例えば電子部品を挿入しようとするとリード線が基板に接触した検知が遅れ、リード線を曲げてしまう。またコネクター挿入では穴の壁に倣わせながらの挿入で傷をつけてしまうことがある。
そういった作業でも、エプソンの力覚センサーは微小な力を感度よく検出できるため、部品を曲げず傷を抑えて挿入できる。その力覚センサーとエプソンのロボットを組み合わせて、ケーブルのコネクター挿入の自動化を実現できた。
ただ、力覚センサーだけでは解決できない課題が、その前工程にあった。ケーブルの位置の認識だ。その都度、形状や向きが異なるケーブル、電線などの柔軟物を認識して把持し、コネクターの上下などの向きを差し込み口に合わせる必要がある。
この課題を解消したのが、クラボウ社の高速3Dビジョンセンサー「KURASENSE(クラセンス)」との協業だった。


この記事を読んだ方へのオススメ記事








産業用ロボットに関する基礎知識 BASIC KNOWLEDGE


ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年7月号の特集は「変種変量時代の勝てる現場~柔軟性と生産性を両立する鍵~」です。電子版も販売しております。詳しくは当欄の下部から。
