協働ロボ・移動ロボ向けのユニットを開発/日本精工
日本精工は2月24日、「協働ロボット用アクチュエータ」と「アクティブキャスタ」の2製品を開発したと発表した。
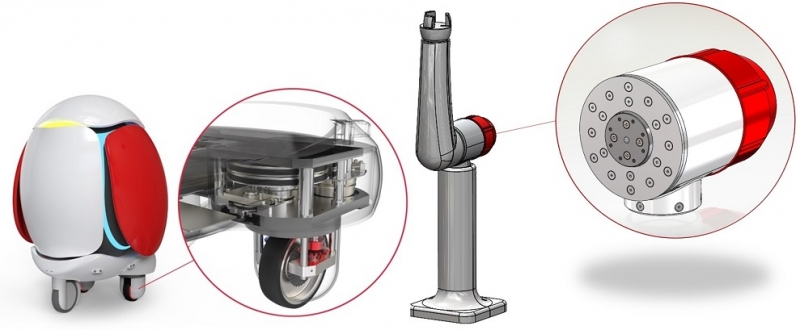
「協働ロボット用アクチュエータ」はモーターと減速機を組み合わせた製品で、協働ロボットの関節部分に使用する。最大の特徴は、出力側にかかる力を入力側に伝達できるバイラテラルギアを減速機構に採用したこと。人との衝突など、ロボットアームにかかる外力をより繊細に検出でき、安全性を高められる。横浜国立大学の藤本康孝教授の研究チームが開発した技術を応用した。
もう一つの「アクティブキャスタ」は、モーター内蔵の車輪だ。自律移動式のロボットや搬送台車などに使用でき、どの方向にも自由自在に移動できる。「二つのモーターで車輪の左右それぞれから駆動し、左右の回転速度の差で車輪を旋回させる。駆動と旋回それぞれにモーターを搭載する車輪と比べて小さなモーターで駆動でき、小型化を実現した」(技術開発本部 小林誠一新領域商品開発センター所長)。
「両製品とも精密なメカを作れる強みを生かした製品。制御やソフトウエアにも工夫を凝らし独自のノウハウを盛り込んでいるが、高度な制御ができるのもメカの強みがあってこそ」と小林所長は語る。
(ロボットダイジェスト編集デスク 曽根勇也)


この記事を読んだ方へのオススメ記事










産業用ロボットに関する基礎知識 BASIC KNOWLEDGE

月刊生産財マーケティング
MAGAZINE
ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年7月号の特集は「変種変量時代の勝てる現場~柔軟性と生産性を両立する鍵~」です。電子版も販売しております。詳しくは当欄の下部から。
