人でもロボでも簡単にクランプ、ジグメーカーの自動化提案/イマオコーポレーション
標準機械部品やジグ(補助器具)を開発、製造、販売するイマオコーポレーション(岐阜県関市、今尾任城社長)が、マシンテンディング(工作機械などに加工物を着脱する作業)向けの自動化提案に力を入れている。人でもロボットでも簡単に加工物をクランプ(固定)できるジグの新製品やロボット用ハンドチェンジャーといった自社の商材を生かし、「ヒトとロボットの共存」を訴求する。
高いクランプ力と均一な操作性
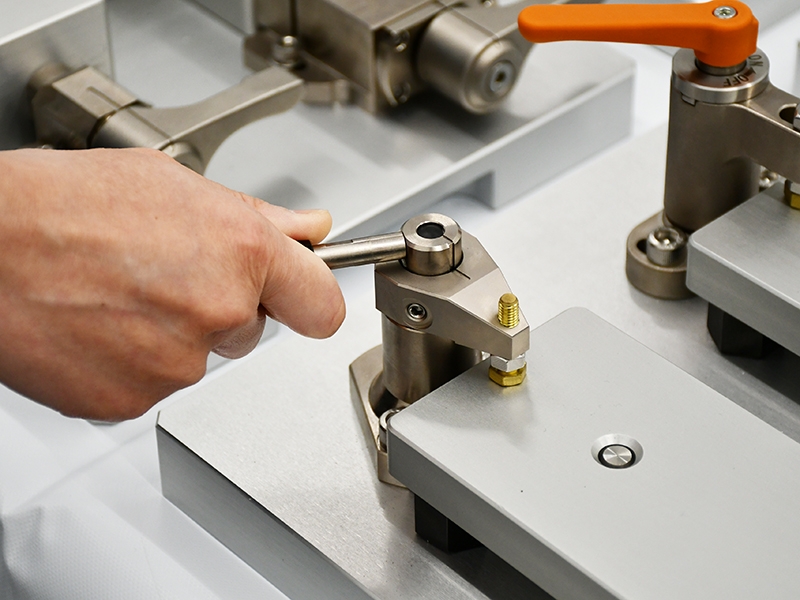
イマオコーポレーションは、工具レスで加工物をクランプ(固定)するジグ「ワンタッチクランプ」を2004年から販売する。一般的なジグには六角レンチやスパナなどの工具が必要だが、ワンタッチクランプはレバーを操作するだけで簡単に加工物を固定できるため、ワーク(被加工物)の着脱で発生する段取り替え(セッティングの変更)の工数を減らし、作業者の負担も軽減できる。
ワンタッチクランプには、カムと呼ばれる機構を用いて加工物を強固にクランプする「カム式」、ばね機構によって誰が操作しても同じ力で固定できる「バネ式」、ばね機構とくさびの倍力機構の両方を採用した新製品の「クサビ式」の3種類がある。今年1月27日に発売したばかりのクサビ式は、高いクランプ力と均一な操作性を両立したのが特徴だ。営業部の小坂理課長代理は「人によって力のばらつきが発生しないバネ式のメリットを維持しつつ、くさびの倍力機構でクランプ力も向上させた」と語る。
ティーチングがしやすい

クサビ式やバネ式には、所定の位置までレバーを操作すると「カチッ」と伝わる機械的なクリック感によってクランプ完了を作業者に合図する機能が実装されている。「クランプ力が均一な上に、クランプ完了時のレバーの位置があらかじめ決まっているため、ロボットのティーチング(動作を覚えさせること)がしやすい。そのため、クサビ式やバネ式はロボットと相性が良い」と小坂課長代理は説明する。
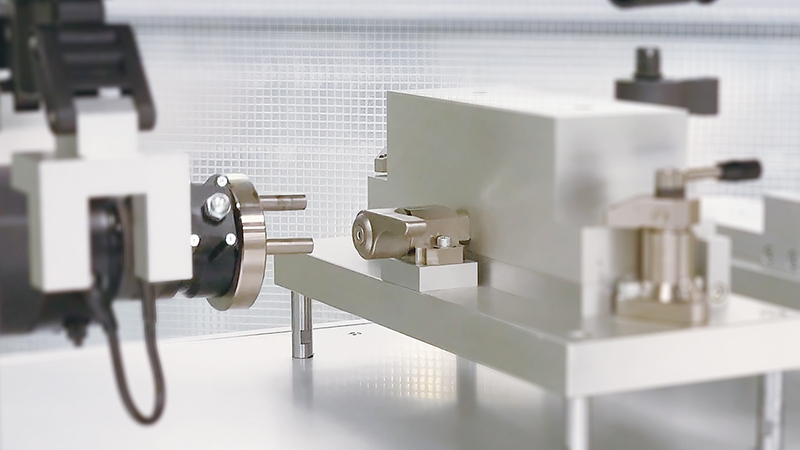
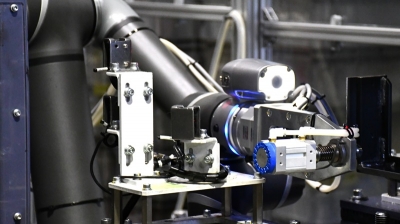
そこで同社は最近、省力化を実現するクランプ製品と省力化に役立つロボット周辺機器を組み合わせた自動化提案に力を入れている。その一環で、昨年11月に東京都内で開かれた工作機械見本市「第32回日本国際工作機械見本市(JIMTOF2024)」でクサビ式のワンタッチクランプとロボット用ハンドチェンジャー「SMARTSHIFT(スマートシフト) ロボットシステム」を使ったデモを披露。「ヒトとロボットの共存」をコンセプトに掲げ、1台の協働ロボットが複数種類のハンドを使い分けながら加工物の着脱やクランプを自動化するデモシステムなどを紹介した。
同じジグを共有
小坂課長代理は「クサビ式は人でもロボットでも簡単に取り扱えるため、同じジグを人とロボットで共有できるのが大きなメリット」と述べる。そのため、手始めにクサビ式だけを購入して人手によるクランプ作業の平準化を図った後、ロボットを導入して自動化につなげる運用がしやすい。また、日中は人が作業しつつ、夜間はロボットで無人稼働させるような運用形態にも柔軟に対応できる。
同社は中品種中量生産や多品種少量生産の加工会社に狙いを定め、こうしたコンセプトの自動化ソリューションを訴求する構えだ。「切削加工の現場でもロボットの需要は今後ますます拡大すると見込まれる。しかし、確実な費用対効果が期待できるロボットシステムの構成がイメージしにくいため、自動化が思うように進まないとの課題もよく聞かれる。そのため、わが社は展示会やウェブサイトを生かし、お客さまやシステムインテグレーター(SIer、エスアイアー)に自社のソリューションを広く周知したい」と小坂課長代理は話す。
(ロボットダイジェスト編集部 桑崎厚史)


この記事を読んだ方へのオススメ記事







産業用ロボットに関する基礎知識 BASIC KNOWLEDGE





ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年6月号の特集は「RTJで“現場”が変わる!~最新ソリューションは愛知に~」です。電子版も販売しております。詳しくは当欄の下部から。
