[気鋭のロボット研究者vol.15]回避と停止を自律で選ぶ移動ロボを【後編】/埼玉大学大学院 琴坂信哉准教授
作業現場では無人搬送車(AGV)、街中では掃除や案内役のサービスロボットの普及が広がり、自律移動型ロボットと人間の間隔は以前よりも格段に近くなった。危険になると動作を停止するロボットも多いが、止まると移動や作業の効率は落ちる。そこで琴坂信哉准教授はロボットを止めずに、安全と効率を両立する制御方法を考える。
人やロボットの動作も考慮に
ロボットの衝突リスクを可視化する琴坂信哉准教授。その研究成果を移動式ロボットの安全確保にも応用し、自律移動式ロボットが人に接近した際に取るべき経路と制御方法を検討する。
一般的に移動式ロボットは、あらかじめ決められた経路に沿って移動する。その際に対物センサーなどを駆使して、周囲の人を察知し、リスクがあればロボットが停止か回避をして安全を確保する。単に人が一定距離内に近づいたかどうかでリスクを判断するものが多い。
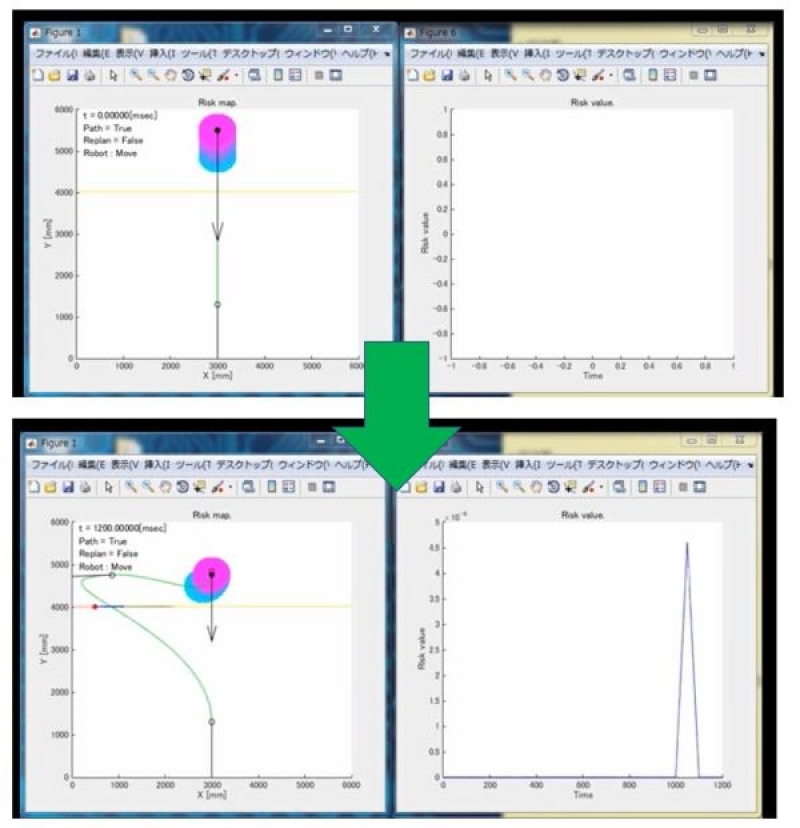
琴坂准教授の研究では、人との距離だけでなく、人やロボットの動作も考慮に入れる。まずロボットの移動経路に人が接近すると、それまでの人の動きの向きと移動の早さを解析し、その後の人の進路や達する位置を予測する。
予測を基にロボットと接触する確率を数値化して見積もる。
衝突リスクと回避の手間を勘案してリスクが高ければ、ロボットの移動経路を再構成して回避する。
人の動きが速いなどの理由で、衝突リスクが高すぎると判断した場合には、移動を止める。
一般的な移動式ロボットは人が近づいたら停止するか、回避するかの二者択一のみ。「衝突リスクを数値で定量的に解析して、回避や停止を自律判断する研究は、世界でも例が少ない」と胸を張る。
今後は人の動きの予測精度の向上に取り組む。「人の動きの予測時間を伸ばし、行動に応じた回避を判断できることで、ロボットがより安全になるようにしたい」と意気込む。
――終わり
(ロボットダイジェスト編集部 西塚将喜)
琴坂信哉(ことさか・しんや)
1995年埼玉大学理工学研究科博士課程を修了。科学技術振興機構の「川人学習動態脳プロジェクト」研究員を経て、2001年埼玉大学工学部講師。02年同助教授。07年から現職。01年から「ロボット安全」の研究を始めた。当時はロボットが安全柵の中だけで稼働する前提のため、ロボット安全は研究対象にはならないと、周囲からよく指摘された。しかし、「今の世の中を見ると研究を続けて良かった」と振り返る。東京都出身の57歳。


この記事を読んだ方へのオススメ記事









産業用ロボットに関する基礎知識 BASIC KNOWLEDGE
関連キーワード



ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年6月号の特集は「RTJで“現場”が変わる!~最新ソリューションは愛知に~」です。電子版も販売しております。詳しくは当欄の下部から。
