[特集SIerになろうvol.12]SIerの負担を減らす製品が続々登場!

ロボットのシステムインテグレーター(SIer、エスアイアー)が足りない――。それならば、SIerの手間が最小限で済むような製品の開発も重要だ。ロボットと周辺機器がある程度までパッケージ化してあれば、1から始めるよりもはるかに短い時間でロボットシステムを立ち上げられ、SIerはより多くの案件をこなせるようになる。それでもSIerの手が回らない場合は、導入する企業自身がシステム構築することもできる。人工知能(AI)技術や独自のプログラミング方法により動作プログラムの作成も簡単だ。[特集SIerになろうvol.12]では、SIerの負荷を軽減するパッケージ製品の中から、工作機械メーカーのオークマとFUJIによる2製品を取り上げ、その特徴や使い方を紹介する。
パッケージで導入ストレスなし

「SIerの仕事を奪うのではなく、SIerの手が回らない領域をこうしたパッケージで補うイメージ」
オークマの家城淳副社長はロボット事業に進出した意図をそう説明する。
同社が昨年秋に開発したロボットシステムは「ARMROID(アームロイド)」と「STANDROID(スタンドロイド)」の2つだ。
アームロイドは、工作機械の加工室内にアーム型の4軸ロボットを配置した画期的な製品だ。通常、ロボットは工作機械の外に置かれるが、アームロイドは庫内で工作機械と一体化されているため、さまざまな使い方が可能だ。ワーク(加工対象物のこと)の着脱は当然のことながら、加工室内の切りくずの清掃、ワークの洗浄、さらにはワークサポートとして使えば加工時のびびりも抑制できる。ロボットを使わないときは、庫内にコンパクトに畳まれて収納されるのも面白い。何と言っても、機械の前をロボットに占有されないことが最大のメリットだろう。
可搬重量は5kg。エンドエフェクターと呼ばれるハンド部分も3種類収納でき、用途別に使い分けが可能である。
劇的な省スペース化

一方、スタンドロイドは複雑な教示作業を必要としない、いわゆるティーチングレスタイプのシステムだ。ファナックや安川電機製の垂直多関節型の6軸ロボットと工作機械の融合を図った。
ロボットを置く場所はアームロイドと違い工作機械の外だが、驚くべきはその省スペースぶり。従来、2×2.5mほど必要だったロボットの占有エリアを、1.2×2mと半減させた。ロボットはその狭い空間の中を、多軸機能をフルに生かしながら、くねくねと最短経路で動き回る。
ロボットの制御システムを担当したのがロボットコントローラーメーカーのMUJIN(東京都墨田区、滝野一征最高経営責任者〈CEO〉)だ。オークマの家城副社長は、「滝野CEOとだと、一日で全部決めて仕事をどんどん進められる。驚くほど短い期間で完成にこぎつけた」とMUJINのスキルの高さを絶賛する。一方、滝野社長も「うちにはそもそも家城副社長をリスペクトしているエンジニアが多い。すごく仕事がしやすかった」と振り返る。
また、アームロイド、スタンドロイドに共通する特徴は、オークマ独自の工作機械制御装置であるOSP上で操作が可能なことだ。通常、工作機械とロボットは、別々の制御装置、別々のプログラム言語で、別々に動かすものである。ところがオークマのシステムのように工作機械の制御装置上でロボットも操作ができれば、機内でロボットが周辺に衝突しないかなどの動作チェックも容易だ。専門スキルがなくても、OSPの対話入力画面からロボットに指示が出せる。
まさにストレスフリーで導入できるパッケージ群と言えるだろう。
FUJIは電子部品実装ロボットの考え方を

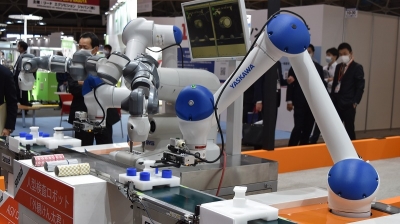
これまでSIerに大きな負担をかけたのがティーチング作業だ。プログラムの知識を持った作業者がロボットの関節やハンドの位置、角度、動きを記憶させる必要がある。そのティーチング作業を独自の操作方法で解決するのが、FUJIの多関節ロボット「SmartWing(スマートウィング)」だ。可搬重量は2kgのため、小型の部品を搬送したり、ねじ締め作業の自動化で活躍する。
先端にカメラを標準装備することで、カメラとロボットの位置合わせが不要で、立ち上げまでの時間を短縮。作業内容や環境にもよるが「立ち上げ時間を約40%短縮できる」とFUJIの藤田政利技術部長は自信を見せる。
また、独自の操作方法「スマートオペレーション」を採用。FUJIが高いシェアを占めるチップマウンターなど電子部品実装ロボットの考えや操作方法、技術を応用したものだ。簡単な座標も指示だけで動かすことができる。
3つの要素の組み合わせ

スマートオペレーションの基本となるシステムは「Job Editor(ジョブ・エディター)」だ。
動作データの作成には①作業対象の「ワーク情報」②作業する位置「作業座標」③置く、ねじ締めなどの標準動作「技」――の3つ。つまり「何を、どこで、どうするか」の3要素を組み合わせてデータを作る。
カメラによるワーク形状の把握、エクセルによる座標入力、そして最初から登録される、もしくは新しく設定した動作項目を選択するだけ。これまでは、扱う部品や動作に変更がある場合、全てのプログラムを組み直す必要がある。しかし、ジョブ・エディターを使えば座標やワークを変更するだけでいいため、多品種少量生産にも対応できる。
また、導入のしやすさを考え、最低限必要な周辺機器を準備した「ロボセルキット」と呼ばれるパッケージを用意する。SIerが担当する設計や組み立てなどにかかる工数を削減する考えだ。
プログラム作成の簡易化やロボセルキットによる周辺機器のパッケージ化で「少しでもSIerの負担を軽減し、多くの案件を担当できるようにしたい」と藤田部長は強調する。
――終わり
(ロボットダイジェスト編集長 八角秀、編集部 渡部隆寛)


この記事を読んだ方へのオススメ記事








産業用ロボットに関する基礎知識 BASIC KNOWLEDGE
関連キーワード

ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年7月号の特集は「変種変量時代の勝てる現場~柔軟性と生産性を両立する鍵~」です。電子版も販売しております。詳しくは当欄の下部から。
