[注目製品PickUp!vol.16]「安全第一」を地で行く協働ロボット【前編】/ダイアディックシステムズ
小物部品のピック&プレースに特化
DSR02-400の安全性は非常に高いが、最大出力が16Wしかないサーボモーターを使うため、推力には限度があり用途も限られる。最大可搬重量も2kgなので、決して何でもできるわけではない。
そのため、ある程度汎用性を犠牲にし、小物部品のピック&プレース(部品を持ち上げ、特定の位置まで運んで下ろす一連の作業)に用途を特化した。ロボットハンドを電動ドライバーにすれば簡単なねじ締め作業などもできるが、ベースの動作はピック&プレースと変わらない。
鶴海社長は「ピック&プレースの主な作業には①装置やコンベヤーから部品を取り出してパレット(荷台)に詰める『パレタイジング』②パレットから部品を取り出して装置などに投入する『デパレタイジング』③一つの箱に入った部品を複数の箱に仕分けていく作業――などがある。おそらくだが、ピック&プレースの作業の大半はこの3つのパターンのどれかに該当するのではないかと思う。DSR02-400はピック&プレースの数ある作業の中でも、特にこの3つのパターンに対応できるようにした」と語る。
プログラムの自動生成も
また、ピック&プレースに特化したことでロボットの動作をシンプルにし、プログラム作成の手間も軽減した。
鶴海社長は「協働ロボットは、従来の産業用ロボットを使ったことがない企業がメインのユーザー層になる」と見通す。
それだけに協働ロボットには、いかに簡単にプログラミングやティーチング(ロボットに動作を覚えさせること)ができるかが求められる。従来の産業用ロボットは、プログラミングやティーチングが難しく、取り扱うのに専門的な知識が必要だからだ。
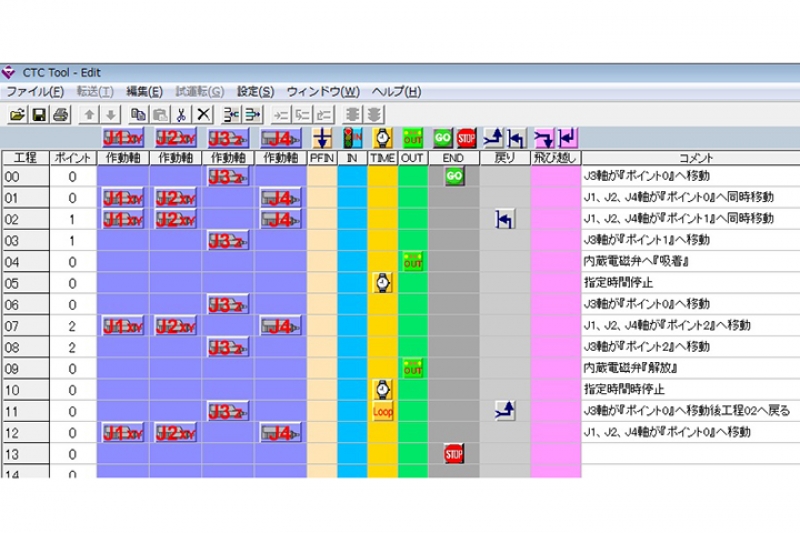
そこで同社は、ロボットアームを直接動かしながらロボットに動作を覚えさせるダイレクトティーチング機能や直感的にロボットのプログラムが作成できるソフトウエア「CTCToolR」など、誰でも簡単に使いこなせるような機能を盛り込んだ。
さらに、部品を箱詰めする作業の場合には、箱の形状や箱の四隅の座標値、部品を取り出すときの座標値などの必要項目を入力するだけで、自動的にプログラムを生成する機能も設けた。
「取り出す部品や箱の形状が変わったとしても、必要項目を改めて入力すればすぐに新しいプログラムを生成できる」と鶴海社長は胸を張る。
なぜ協働ロボットを開発?
ここまでは製品の特徴を紹介した。後編では、電動シリンダーやサーボモーターを製造していた同社がなぜ協働ロボットの開発に踏み切ったのかを解説する。他社製の協働ロボットは垂直多関節タイプが多いが、同社の協働ロボットはスカラタイプだ。スカラタイプを採用したのも、根本には「本質安全」の考え方があった。――後編へ続く(ロボットダイジェスト編集部桑崎厚史)


この記事を読んだ方へのオススメ記事









産業用ロボットに関する基礎知識 BASIC KNOWLEDGE


ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年5月号の特集は「AIブームが広げる市場~成長領域のニーズに応えよ~」です。電子版も販売しております。詳しくは当欄の下部から。
