[気鋭のロボット研究者vol.20]センサーなくても組み付け【後編】/和歌山大学 土橋宏規講師
和歌山大学の土橋宏規講師は、ロボットの周囲を感知する外界用のセンサーを搭載しないロボットハンドの機構や把持のプロセスを研究する。外界センサーを使わないという縛りは、ハンドの製造コストを抑えるだけでなく、把持計画に工夫をこらすことにつながる。後編では、実際に考案した把持計画の例を紹介する。
つかんで、ひねって、滑らせる
位置や姿勢が定められていない物をロボットハンドでつかむ時は、ビジョンセンサーや接触センサーで物の位置や姿勢を把握してからつかむ場合が多い。しかし、センサーの搭載が当たり前になると、ハンドの製造コスト低減が難しくなり、把持計画を工夫しようとする思考も薄れてしまう。
土橋宏規講師は、ロボットハンドの基礎研究として、外界の情報なしでどのような把持ができるかを追求している。
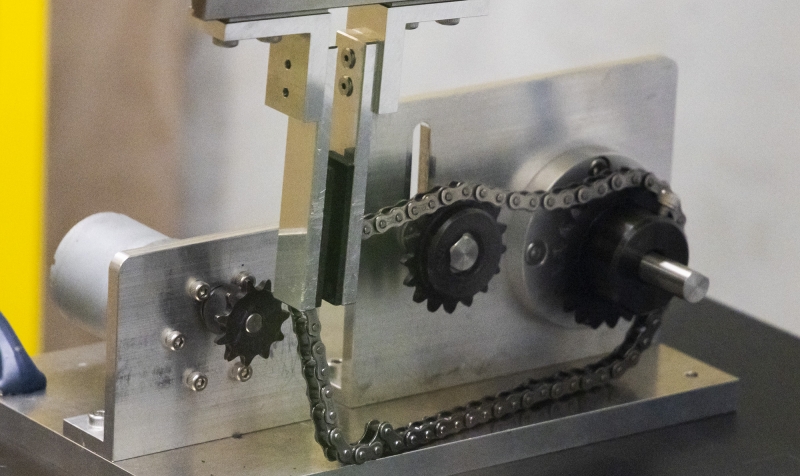
土橋講師が指導する研究室では、物をつかむだけでなく、組み付け作業も研究の対象とする。「ワールドロボットサミット2018」の競技会に出題した課題にも解答例を提示した。特に難問だったのは、3つのスプロケット(歯車)にチェーンを組み付ける課題だ。
チェーンは、部品は固いが全体としては不定形な特徴があり、つかみづらく、コントロールしにくい。土橋講師らは、指幅の広い平行指グリッパーを使うことで確実にチェーンをつかみ、揺動させて1つ目のスプロケットに装着。2つ目はかぶせるように装着し、3つ目はひねりながら指の中で滑らせて装着した。
「9割以上の成功率で組み付けできた」と話す。
把持計画を考える時、土橋講師は「まずは人の手で何度も組み付け、どういった要素が必要なのか深く考察するように心がけている」と話す。「センサーなしでできることが増えれば、センサーを使ってできることも増えるはず。これからも研究に力を尽くす」と語る。
――終わり
(ロボットダイジェスト編集部 松川裕希)
土橋宏規(どばし・ひろき)2012年京都大学大学院工学研究科博士課程修了、関西学院大学理工学部契約助手。13年立命館大学理工学部助教、17年和歌山大学システム工学部講師。12年計測自動制御学会学術奨励賞、日本ロボット学会研究奨励賞、16年システム制御情報学会論文賞、20年日本機械学会奨励賞など受賞。「ワールドロボットサミット」ものづくり競技委員会委員。大阪府出身の37歳。


この記事を読んだ方へのオススメ記事








産業用ロボットに関する基礎知識 BASIC KNOWLEDGE
関連キーワード



ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年6月号の特集は「RTJで“現場”が変わる!~最新ソリューションは愛知に~」です。電子版も販売しております。詳しくは当欄の下部から。
