[気鋭のロボット研究者vol.18]ドローンの応用で安定した懸垂を【後編】/中央大学 大隅久教授
大隅久教授は産業用ロボットの自由度を高める研究を数多く手掛ける。後編では、ワイヤで懸垂した物の揺れを抑える研究を紹介する。これは、ワイヤで懸垂した産業用ロボットの制御に必要な技術。長年苦労したが、打開策を昨年見つけた。
垂直多関節ロボの可動範囲を広げる研究から
大隅教授は1994年から、ワイヤでつり下げた垂直多関節ロボットを研究する。
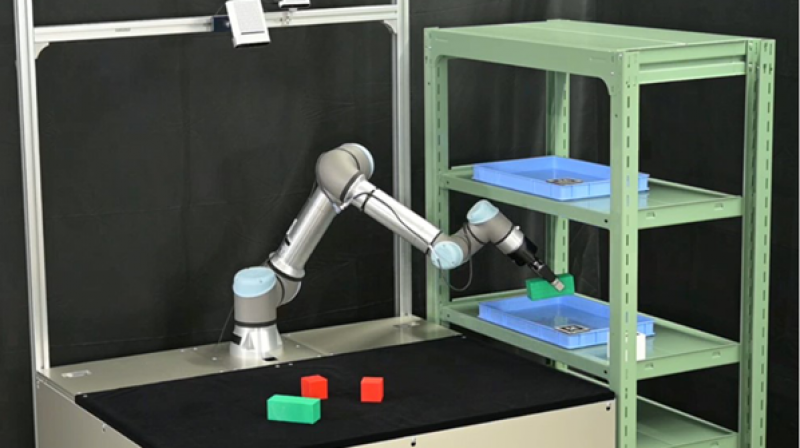
複数のワイヤでつり下げて移動させる仕組みで、垂直多関節ロボットの可動範囲は大幅に広がる。システムを安定して稼働させるには、ワイヤの先でロボットを固定するベース部分が揺れてはならない。そこで、揺れない懸垂機構を研究する。
まず、ロボットのベースを6本のワイヤでつり下げた。すると、揺れにくい懸垂機構ができた。
「要はX、Y、Zの3方向とそれぞれの回転軸で合計6軸を固定できれば、物は空間上を動かない。1本のワイヤで1軸を固定した」(大隅教授)。しかし、可動範囲があまり広がらなかった。
可動範囲が広がるも、今度は揺れが
次に4本のワイヤでつり下げた。可動範囲は広がったが、今度はロボットの動作で重心が変化して揺れた。そこで、重心の変化を抑える機構が必要になった。
当初は、重心の変化に応じて、つり合いを取る重りを付けた。重りの乗った直交軸をベースに搭載し、重心の変化を打ち消すように重りを移動させる。
しかし、直交軸の動きで別な揺れが生じた。
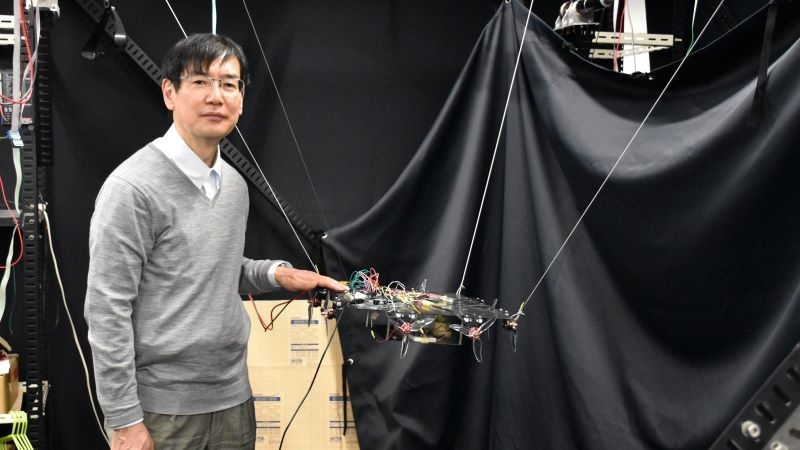
昨年、打開策を見つけた。着想を得たのは小型無人航空機(ドローン)だ。
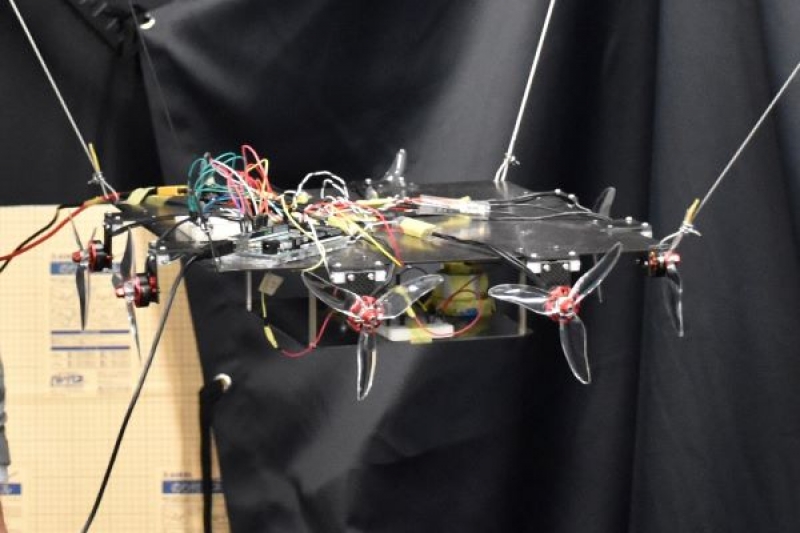
ドローンは慣性を測定するセンサーで自身の姿勢を検知しながら、複数のプロペラを制御して、安定したまま自在に空中を飛び回る。その姿勢維持の仕組みを応用した。
つり下げたベースの揺れをセンサーで検知すると、揺れに逆行するプロペラを稼働させ、推力で揺れを相殺する。
「学生の着眼点も借りて、障壁を乗り越えられた。応用を進めたい」と意気込む。
――終わり
(ロボットダイジェスト編集部 西塚将喜)
大隅久(おおすみ・ひさし)1985年東京大学工学部卒。87年同大学院修士課程修了、91年同博士課程を修了し、同専任講師。93年同助教授。94年中央大学理工学部助教授。2001年から現職。登山と写真撮影が趣味で、研究室には自身で撮影した紅葉時の山岳などの写真を飾る。東京都出身の59歳。


この記事を読んだ方へのオススメ記事







産業用ロボットに関する基礎知識 BASIC KNOWLEDGE
関連キーワード


ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年7月号の特集は「変種変量時代の勝てる現場~柔軟性と生産性を両立する鍵~」です。電子版も販売しております。詳しくは当欄の下部から。
