[気鋭のロボット研究者vol.17]ロボットで人の幸福を追求【後編】/大阪工業大学 野田哲男教授
大阪工業大学の野田哲男教授は、基礎技術からプログラミング、ロボットハンドまで産業用ロボットについて幅広く研究する。前編では電気や空圧といった動力を使わないロボットハンドを紹介したが、後編では自ら行動設計するロボットの構想について聞いた。ロボットに関する技術にとどまらず、ロボット産業の発展に寄与する取り組みもある。
ロボット自ら位置を特定
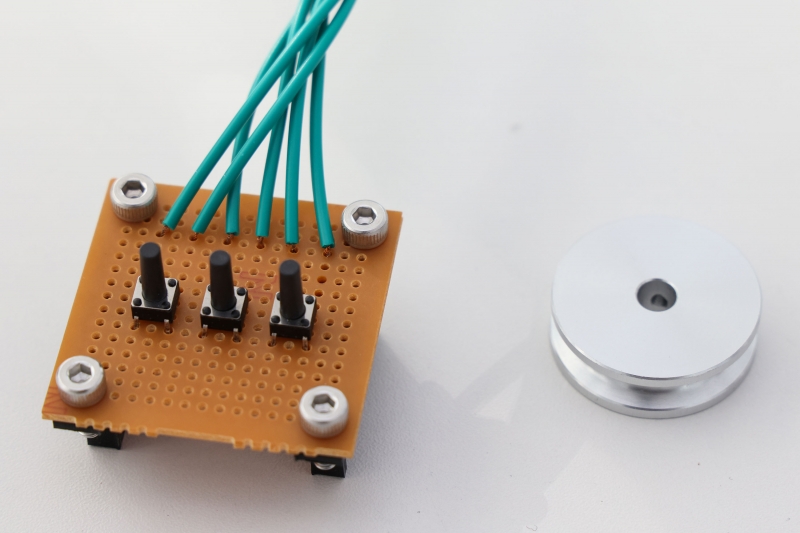
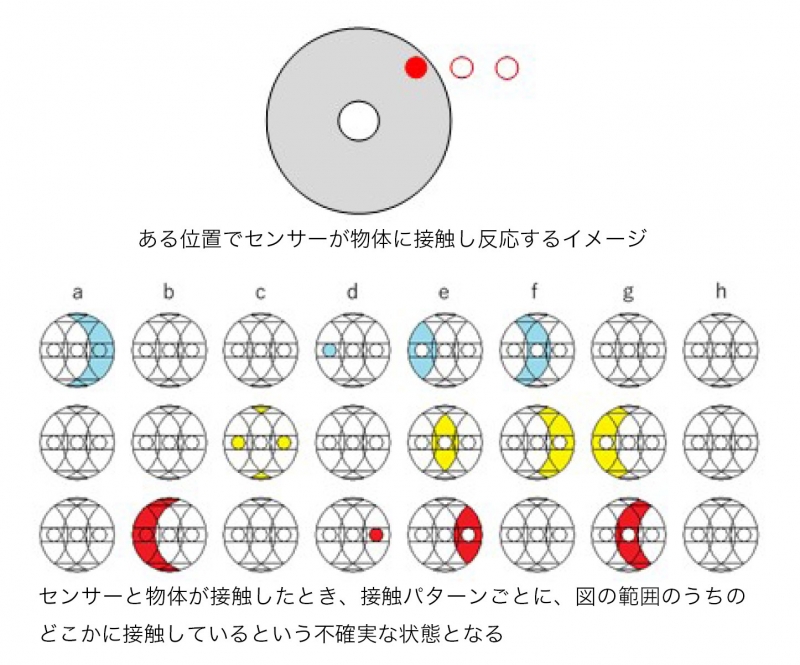
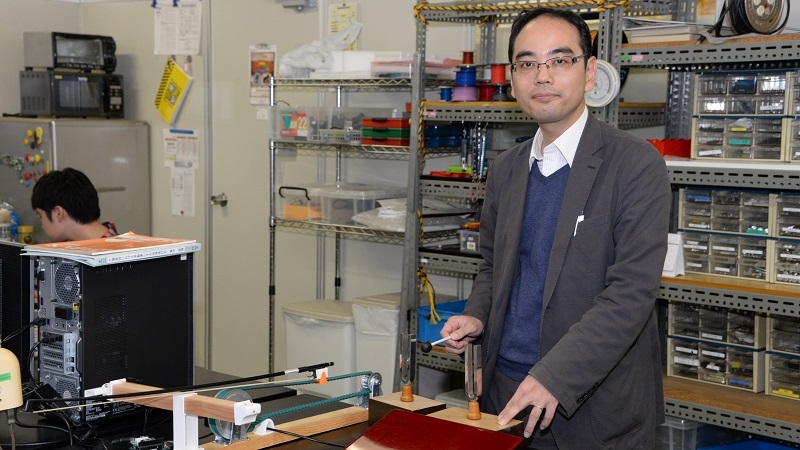
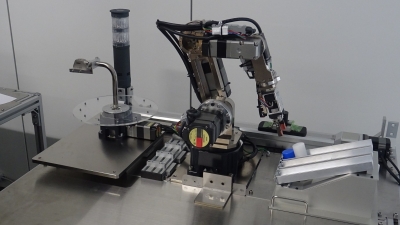
大阪工業大学の野田教授が研究するロボットは、ビジョンセンサーを使わず3本のピンを持つエンドエフェクター(ロボットアーム先端に取り付けるユニット)で対象物の位置を特定する。3本のピンは1本ずつ独立して接触を検知する機能がある。エンドエフェクターを指定エリアに近付け、どのピンが対象物に接触するかで対象物の位置を特定する。
1回の動作でどのピンも接触しなかった場合、別の場所に動かすのだが、対象物の位置を特定するにはどこに動かすのが効率的なのか。野田教授はそのプロセスを自ら計画するロボットを研究している。「これを応用すれば、要素部品を単純に足し算して実現できる機能にとどまらず、それ以上の価値を生むことができる」と力を込める。
ロボットで人の幸福を追求
ロボットシステムの評価の数値化にも、他のロボット研究者と共同で取り組んでいる。「システムインテグレーター(SIer、エスアイアー)がシステム設計費用を算出する目安にし、SIerとしての技術力を評価する基準にするなど、ロボット産業の発展に寄与できる」と話す。
野田教授は「ロボットを使って仕事を自動化することで、人は自分の時間を作ることができ、ひいては幸福につながる。災害などで生活基盤を失うような場合でも、ロボットの仕事なら別の場所で再開できる」とロボット普及のメリットを語り、その実現に力を尽くす考えだ。
――終わり
(ロボットダイジェスト編集部 松川裕希)
野田哲男(のだ・あきお)1987年大阪大学大学院基礎工学研究科博士前期課程修了、三菱電機入社。2016年奈良先端科学技術大学院大学情報科学研究科情報科学専攻博士課程修了、博士号取得。17年大阪工業大学教授。同年「ワールドロボットサミット」ものづくり競技委員会委員。18年日本ロボット学会フェロー。20年計測自動制御学会システムインテグレーション部門長。大阪府出身の58歳。


この記事を読んだ方へのオススメ記事






産業用ロボットに関する基礎知識 BASIC KNOWLEDGE
関連キーワード

ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年7月号の特集は「変種変量時代の勝てる現場~柔軟性と生産性を両立する鍵~」です。電子版も販売しております。詳しくは当欄の下部から。
