AIロボットコンセプト「Robotic Nimbus」の研究成果を発表

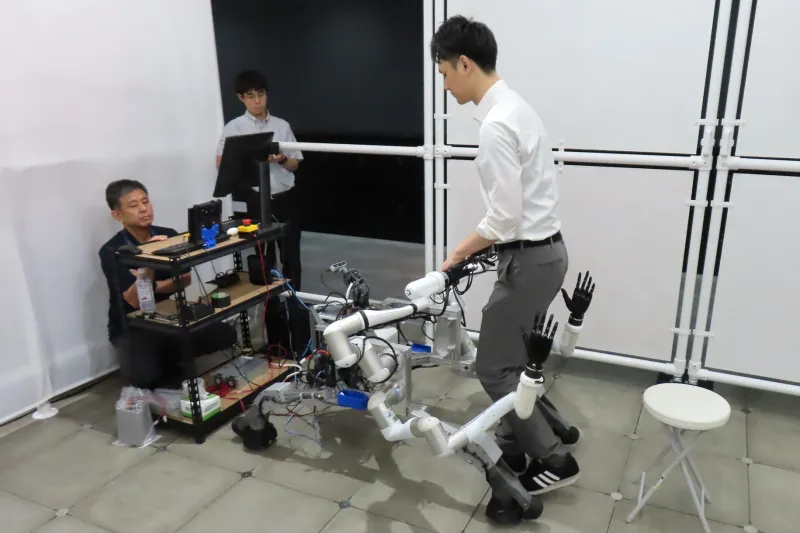
7月8日に「活力ある社会を創る適応自在AIロボット群成果報告シンポジウム」が都内の「CO-CREATION PARK―KAWARUBA(コークリエーション・パーク・カワルバ)」で開かれた。このシンポジウムは「JST(科学技術振興機構)ムーンショット型研究開発プロジェクト」の東北大学大学院平田泰久教授(=写真右から2番目)がリーダーを務めるプロジェクトの現在までの研究開発成果を紹介するもの。
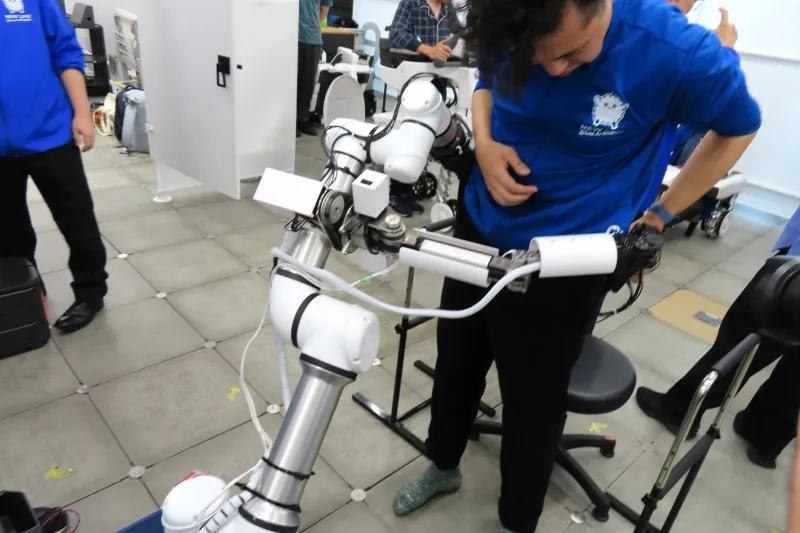
同プロジェクトでは「Robotic Nimbus(ロボティックニンバス)」の研究開発を進める。これは特定のロボットを指す言葉ではなく、「雲のように柔らかく自由自在に変形し、くっついたり離れたりしながら人の活動を支えるAI(人工知能)ロボット群」を指すコンセプトだ。同シンポジウムではロボティックニンバスの一例として、体の一部にまひがある人のリハビリを支援するロボットを紹介。また、ロボットが支援することで子どもが綱渡りをできるようになった事例なども発表した。「ロボットが支援はするが『自分自身でやっている感覚』を持てることが重要。その感覚が新しい活動への挑戦を後押ししてくれる」と平田教授は説明した。
またシンポジウムに合わせてロボットの展示も行い、ロボットアームで日常動作を支援するシステムなどが展示された。
(ロボットダイジェスト編集デスク 曽根勇也)


この記事を読んだ方へのオススメ記事









産業用ロボットに関する基礎知識 BASIC KNOWLEDGE

月刊生産財マーケティング
MAGAZINE
ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年7月号の特集は「変種変量時代の勝てる現場~柔軟性と生産性を両立する鍵~」です。電子版も販売しております。詳しくは当欄の下部から。
