[気鋭のロボット研究者vol.34]人間の動作をデータ化する【前編】/神戸大学大学院 元井直樹 准教授
産業用ロボットで人間の手作業を完全に代替するのはまだ難しい。元井直樹准教授は人間の動作の「抽出」「再現」「創出」の3ステップを通じて手作業の自動化を目指す。前編ではその第一段階として、人の手から入力した情報をデータとして収集する人間動作の抽出について紹介する。
物をつまむ作業をリモート化
元井准教授は人手不足による労働力不足の解決策として、現在は産業用ロボットによる手作業の自動化について研究する。研究内容は①人間動作の抽出②人間動作の再現③人間動作の創出――の3段階に分けられる。
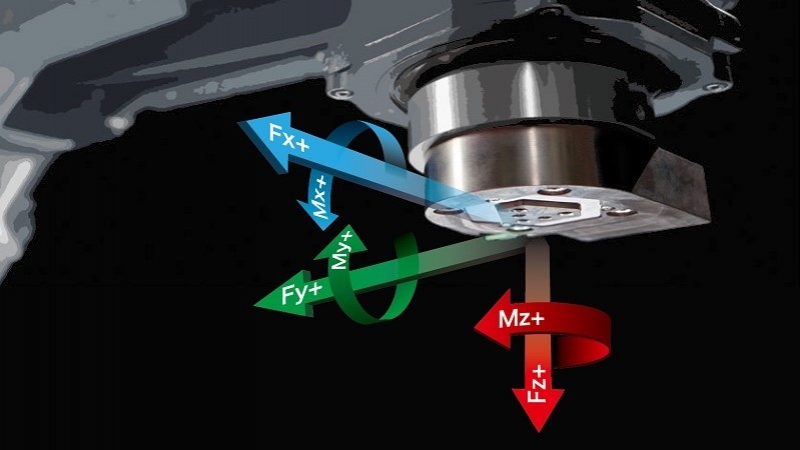
元井准教授は、人間の動作をデータとして収集、保存することを人間動作の抽出と定義する。それを実現する手段として、バイラテラル制御を使う。バイラテラル制御とは、力覚情報を伝達する遠隔操作技術のひとつ。元井准教授は手作業による製品の組み立てで欠かせない、物をつまむ作業のリモート化を研究する。
リモート化による恩恵
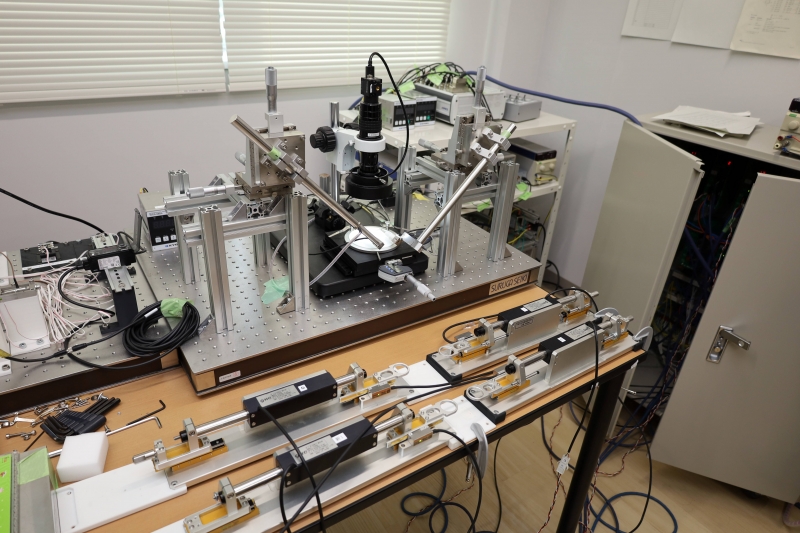
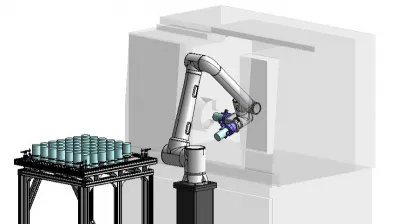
研究には人が操作するリーダー機と、リーダー機に連動して遠隔で動くフォロワー機の2台を使う。リーダー機には2つのリングが、フォロワー機にはピンセットのように物をつまむ器具が付いている。リングに親指と人さし指を引っ掛け、つまむように指を動かすと、その力加減に応じて遠隔機に付いた器具も動く。フォロワー機のつまむ器具が物に触れたら、その感触がリーダー機にフィードバックされるため、まるでその場でつまんでいるかのような感覚になる。
フォロワー機に伝達させる力を小さくすることもできる。人間の指ではつまむと破損しかねないものでも扱えるようになる。「研究では1000分の1まで倍率を変えている。これが限界ではなく、さらに倍率を小さくできる余地がある」と意気込む。
(ロボットダイジェスト編集部 斉藤拓哉)
元井直樹(もとい・なおき)
2007年慶應義塾大学大学院理工学研究科総合デザイン工学専攻前期博士課程修了、同年トヨタ自動車入社。10年慶應義塾大学大学院理工学研究科総合デザイン工学専攻後期博士課程修了。11年横浜国立大学大学院工学研究院研究教員。14年神戸大学大学院海事科学研究科講師。16年4月より現職。19年から20年までウィーン工科大学にて客員教授を兼任。休日は子供と遊ぶのが癒やしのひと時。兵庫県出身の42歳。
〇気鋭のロボット研究社:記事一覧


この記事を読んだ方へのオススメ記事








産業用ロボットに関する基礎知識 BASIC KNOWLEDGE

ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年7月号の特集は「変種変量時代の勝てる現場~柔軟性と生産性を両立する鍵~」です。電子版も販売しております。詳しくは当欄の下部から。
