[気鋭のロボット研究者vol.25] 減速機が変わると、ロボットも変わる【後編】/横浜国立大学 藤本康孝教授
藤本康孝教授などが開発した「バイラテラル・ドライブ・ギヤ」は、前編で紹介した協働ロボット向けの用途だけでなく、さまざまな応用の可能性を秘める。藤本教授は「自律して行動を決める知能ロボットの研究に貢献し、環境にやさしいロボットの開発もできる」と期待を込める。
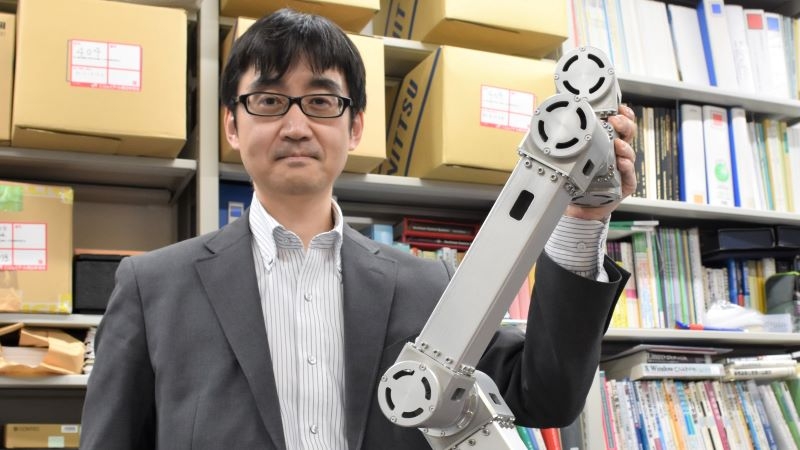
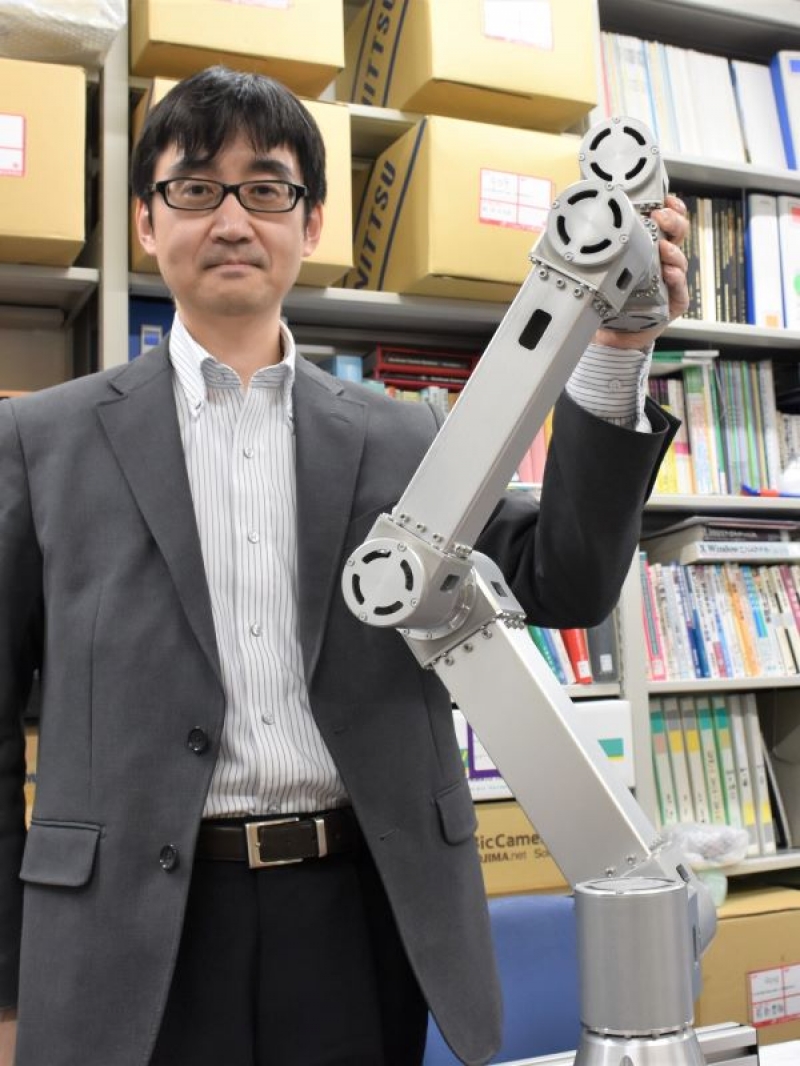
試験ロボットを組み立て中
藤本康孝教授が新エネルギー・産業技術総合開発機構(NEDO)などと共同開発した「バイラテラル・ドライブ・ギヤ」の応用範囲は広い。
現在、組み立て中なのが、同ギアを使った垂直多関節型の試験ロボットだ。完成すれば、ロボットのモーションコントロール理論を実証しやすくなると見込む。
垂直多関節ロボットでは、減速機での動作エネルギーの損失が大きく、損失の数値が安定しない。そこでモーションコントロールの研究では、減速機の影響を加味せずに理論を組み立てる例が多い。一方、実機を使う実証実験が難しい。
それを乗り越えるために全軸にダイレクトドライブ(DD)モーターを組み込んだロボットが生み出されるほどだ。
減速機から知能ロボを

実証用のロボットに動作効率の良い今回のギアを使うと、エネルギーの損失を抑えられ、理論に近い姿で実証実験をできる。
ロボットの動作理論が充実すると、位置決めの精度が向上するなど、より高度な知能ロボットの実現も近づく。

また、出力側にかかる力を入力側に伝達する逆駆動の効率が高い。そのため、回生ブレーキで電気エネルギーを回収しやすい。
ロボットでワークを持ち上げる際に、持ち上げるには電気エネルギーをモーターで使い、下ろすには回生ブレーキをかけて、電気を回収する。
「動作効率を極限まで高めれば、実質のエネルギーロスがほぼ無い状態で稼働するロボットも夢物語ではない。それだけでなく、電気自動車や発電用の風車など、エネルギーの損失を抑えた減速機が活躍できる用途は広い」と期待を込める。
――終わり
(ロボットダイジェスト編集部 西塚将喜)
藤本康孝(ふじもと・やすたか)
1998年横浜国立大学工学研究科電子情報工学専攻博士課程修了。同年慶応義塾大学理工学部嘱託助手。99年横浜国立大学工学部助手、2000年同講師、02年同大学大学院工学研究院知的構造の創生部門助教授、07年同准教授、13年から同教授(現職)。海外のサイエンスフィクション(SF)作品を中心に映画鑑賞が趣味。特に科学的根拠に基づく作品「ハードSF」を好む。神奈川県出身の51歳。


この記事を読んだ方へのオススメ記事









産業用ロボットに関する基礎知識 BASIC KNOWLEDGE
関連キーワード



ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年6月号の特集は「RTJで“現場”が変わる!~最新ソリューションは愛知に~」です。電子版も販売しております。詳しくは当欄の下部から。
