[気鋭のロボット研究者vol.28] ワイヤから広がる研究テーマ【後編】/中京大学 木野仁教授
中京大学の木野仁教授は、パラレルリンクロボットのアームを軽量で柔軟なワイヤに置き換えた「パラレルワイヤ駆動ロボット」の研究を学生時代から続けている。この研究が「源流」となり、現在の受動歩行ロボットや筋骨格型ロボット、レスキューロボット、免震システムなどに研究テーマが広がった。後編では、これらの応用研究について紹介する。
レスキューロボットや免震システムも
受動歩行ロボットや筋骨格型ロボットなど、幅広いテーマの研究に取り組む中京大学の木野仁教授。これらは全て、前編で紹介したパラレルワイヤ駆動ロボットの研究から芋づる式に派生した。
「ワイヤも人の筋肉も引っ張り方向にしか力を伝達できず、似たような特性を持っていることから、筋骨格構造の研究を始めた。受動歩行ロボットはその筋骨格構造を応用した研究だ」と木野教授は説明する。
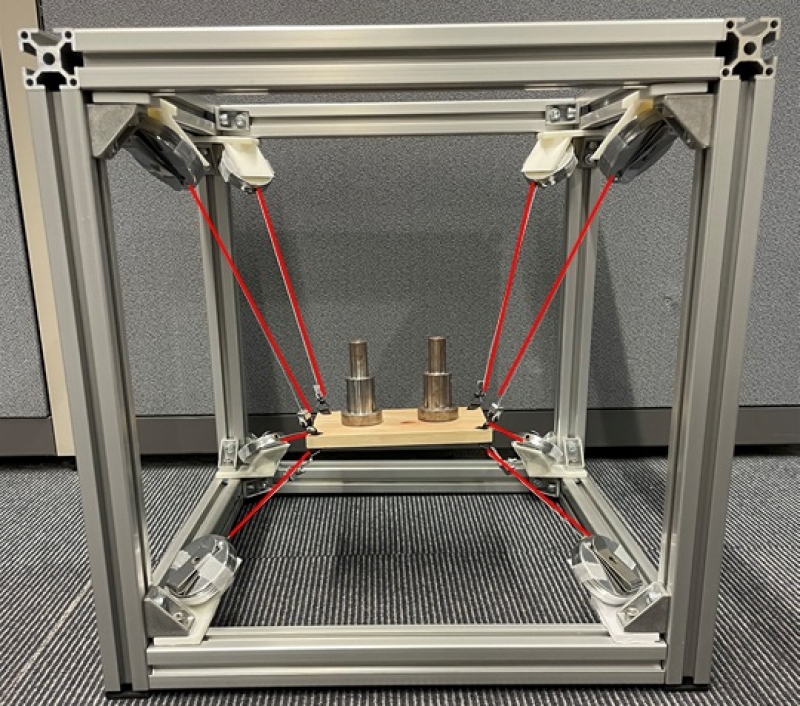
最近は、パラレルワイヤ駆動ロボットの構造を生かした独自の「レスキューロボット」の研究に力を入れている。パラレルワイヤ駆動ロボットはアクチュエーターユニットがワイヤを巻き取ったり繰り出したりするが、木野教授が手掛けるレスキューロボットは主に人力で操作する。「厳密には『ロボット』と言えないかもしれない。だが、被災地では電力供給が停止されていることも多く、有事の際は手動操作の方が実用性は高い」と話す。
製造現場で使われる安価なチェーンブロックを使い、複数人が協力し合ってリールを操作することで、がれきなどを撤去するイメージだ。
また、パラレルワイヤ駆動ロボットの構造を生かした免震システムの研究にも取り組む。「ワイヤの本数次第で最大6自由度まで制御できるため、この構造を生かせば縦揺れにも横揺れにも対応できる」と木野教授は語る。
――終わり
(ロボットダイジェスト編集部 桑崎厚史)
木野仁(きの・ひとし)
2000年7月立命館大学大学院理工学研究科で博士号(工学)を取得。01年4月福岡工業大学工学部知能機械工学科講師、03年4月助教授、07年4月准教授、11年4月教授。20年4月中京大学工学部機械システム工学科准教授、22年4月から現職。「工学博士が教える高校数学の『使い方』教室」(ダイヤモンド社)など、多数の書籍を出版する。技術士(機械部門)の資格も保有しており、技術コンサルティングサービスを有償で手掛ける。静岡県出身の52歳。


この記事を読んだ方へのオススメ記事







産業用ロボットに関する基礎知識 BASIC KNOWLEDGE
関連キーワード



ロボットダイジェストのパートナーメディア「月刊生産財マーケティング」。工作機械や関連機器のマーケティング誌で、最新技術やメーカー各社の販売戦略、分析記事など、ものづくりに携わる方々に有益な情報が満載です。2026年6月号の特集は「RTJで“現場”が変わる!~最新ソリューションは愛知に~」です。電子版も販売しております。詳しくは当欄の下部から。
